Механические и рабочие характеристики ад. §2.4. Основные характеристики трехфазных асинхронных двигателей
К энергетическим характеристикам асинхронного двигателя относятся КПД двигателя(η) коэффициент мощности (cosφ) и скольжение S.
коэффициент полезного действия (η) вычисляется как отношение полезной мощности на валу двигателя Р2 кВт, к активной мощности, потребляемой двигателем из сети Р1 кВт;
η = Р2/ Р1 коэффициент мощности (cos(φ)вычисляется как отношение потребляемой активной мощности Р1 кВт, к полной мощности, потребляемой из сети S1 кВА;
По ГОСТ Р. 51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
Причем КПД и cosφ асинхронного двигателя определяются и нагрузкой машины. В справочниках по электрическим машинам можно увидеть эти зависимости.
Линейный ток двигателя можно определить исходя из номинальной полезной мощность (Р2, кВт), номинального напряжения (UH, В), КПД (η) и cosφ.
Мощность, потребляемая из сети можно определить из формулы:
Скольжение вычисляется как разницу между номинальной n1 и синхронной nc частотой вращения двигателя, приведенной к номинальной скорости двигателя n1:
Номинальную частоту вращения ротора n1 или скольжение (S, %)можно определить по каталогу двигателя или прочесть на его шильдике.
Механические и пусковые характеристики асинхронного двигателя
Одной из основных характеристик асинхронного двигателя, является механическая характеристика. Механической характеристикой называют зависимость скорости вращения или скольжения от вращающего момента на валу двигателя. Она позволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Соответственно, зависимость скорости вращения или скольжения от тока статора называют электромеханической характеристикой.
Механическая характеристика асинхронного двигателя определяет зависимость момента на валу двигателя от скольжения, при сохранении неизменного напряжении и частоты питающей сети
Пусковые характеристики определяют величину пускового моментаMп, минимального момента Мmin, максимального или критического момента Мкр., пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
Номинальный вращающий момент можно определить по формуле:
P2н- номинальная мощность, кВт,
N1н- номинальная частота вращенияю, об/мин.
Пусковые характеристики асинхронного двигателя
Пусковые характеристики асинхронного двигателя регламентирует ГОСТ 28327 (МЭК 60034 — 12), а их значения приводятся в каталогах. Стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам, которые определены в ГОСТ 28327 и МЭК 60034-12:
N – двигатели с нормальный моментом;
Н –двигатели с повышенным моментом.
Двигатели, изготовленные в исполнении N, рассчитывают на два последовательных пуска с остановкой между пусками из холодного состояния или на один пуск из нагретого состояния, после работы при номинальной нагрузке.
Момент сопротивления нагрузки при запуске прямо пропорционален квадрату частоты вращения и равняется номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, γ , кг*м2, не должно превышать рассчитанного по формуле
![]()
где Р-номинальная мощность двигателя, кВт;
р — число пар полюсов;
При построении характеристики предполагается, что момент сопротивления нагрузки остается постоянным и равен номинальному моменту. Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Механические характеристики асинхронных мшин зависят в том числе и от типа ротора, его номинальной мощности, и от числа пар полюсов.
Ввиду того, что разность в значениях момента при соответствующих скольжениях у двигателей с различным числом пар полюсов невелика, и не превышает значения поля допуска на моменты. Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
1 — исполнение N; 2 — исполнение Н; 3 — с повышенным скольжением. Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 - s).
Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1.
По мере увеличения нагрузки на валу отношение s = Pэ2/Pэм растет, достигая значений 0,01 - 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2" угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2" возрастают электрические потери в роторе.
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 - полезная мощность, Вт; ω2 = 2πf 2/ 60 - угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
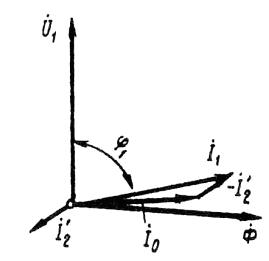
Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода.
Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 - 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
РАБОТА ПО ЭЛЕКТРОТЕХНИКЕ
"Рабочие характеристики асинхронного двигателя"
Введение
Асинхронная электрическая машина – это электрическая машина переменного тока, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит от нагрузки. Используется в основном как двигатель и как генератор. Статор имеет пазы, в которые укладывается одно- или многофазная (чаще трёхфазная) обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания подвижного магнитного поля, вращающегося кругового- у трёхфазных и пульсирующего или вращающегося эллиптического-у однофазных машин. Ротор – вращающаяся часть электрической машины, предназначен также для создания магнитного поля, которое, взаимодействуя с полем статора, ведёт к созданию электромагнитного вращающего момента, определяющего направление преобразования энергии. У генераторов этот момент носит тормозной характер, противодействуя вращающему моменту первичного двигателя, приводящего в движение ротор. У двигателей, наоборот, этот момент является движущим, преодолевающим сопротивление приводимого во вращение ротором механизма.
Асинхронный генератор-это асинхронная электрическая машина, работающая в генераторном режиме. Вспомогательный источник электрического тока небольшой мощности и тормозное устройство (в электроприводе).
Асинхронный электродвигатель – это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель (изобретен в 1889 М.О. Доливо-Добровольским). Асинхронные электродвигатели отличаются относительной простотой конструкции и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых нагрузках. Мощность от долей Вт до десятков МВт.
1. Асинхронный двигатель
1.1 Частота вращения магнитного поля и ротора
Пусть n 1 – частота вращения магнитного поля. Многофазная система переменного тока создаёт вращающееся магнитное поле, частота вращения которого в минуту n1=60f1/p, где f1 – частота тока, p – число пар полюсов, образуемых каждой фазой статорной обмотки.
n 2 – частота вращения ротора. Если ротор вращается с частотой не равной частоте вращения магнитного поля (n2≠n1), то такая частота называется асинхронной. В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте.
При работе частота вращения ротора всегда меньше частоты вращения поля.
( n 2< n 1)
1.2 Принцип действия асинхронного двигателя
В асинхронных двигателях вращающееся магнитное поле создаётся трёхфазной системой при включении её в сеть переменного тока. Вращающееся магнитное поле статора пересекает проводники обмотки ротора и индуцирует в них э.д.с. Если обмотка ротора замкнута на какое-либо сопротивление или накоротко, то в ней под действием индуцируемой э.д.с. проходит ток. В результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем обмотки статора создаётся вращающий момент, под действием которого ротор начинает вращаться по направлению вращения магнитного поля. Для изменения направления вращения ротора необходимо поменять местами по отношению к зажимам сети любые два из трёх проводов, соединяющих обмотку статора с сетью.
1.3 Устройство асинхронного двигателя
Сердечник статора набирается из стальных пластин, толщиной 0,35 или 0,5 мм. Пластины штампуют с пазами и крепят в станине двигателя. Станину устанавливают на фундаменте. В продольные пазы статора укладывают проводники его обмотки, которые соединяют между собой так, что образуется трёхфазная система. Для подключения обмоток статора к трёхфазной сети они могут быть соединены звездой или треугольником. Это даёт возможность включить двигатель в сеть с разным напряжением. Для более низких напряжений (220/127 В) обмотка статора соединяется треугольником, для более высоких (380/220 В) – звездой. Сердечник ротора также набирают из стальных пластин толщиной 0,5 мм. Пластины штампуют с пазами и собирают в пакеты, которые крепят на валу машины. Из пакетов образуется цилиндр с продольными пазами, в которых укладывают проводники обмотки ротора. В зависимости от типа обмотки ротора асинхронные машины могут быть с фазным и короткозамкнутым ротором. В короткозамкнутую обмотку нельзя включить сопротивление. В Фазной обмотке проводники соединены между собой, образуя трёхфазную систему. Обмотки трёх фаз соединены звездой. Обмотку ротора можно замкнуть на сопротивление или накоротко. Двигатели с короткозамкнутым ротором проще и дешевле, однако двигатели с фазным ротором обладают лучшими пусковыми и регулировочными свойствами (они используется при больших мощностях). Мощность асинхронных двигателей колеблется от нескольких десятков Ватт до 15000 кВт при напряжении обмотки статора до 6 кВ. Недостаток асинхронных двигателей – низкий коэффициент мощности.
1.4 Работа асинхронного двигателя под нагрузкой
n 1 – частота вращения магнитного поля статора. n 2 – частота вращения ротора.
n 1 > n 2
Магнитное поле статора вращается в том же направлении, что и ротор и скользит относительно ротора с частотой n s = n 1 – n 2
Отставание ротора от вращающегося магнитного поля статорахарактеризуется скольжениемS = n s / n 1, => S = ( n 1 – n 2) / n 1
Если ротор неподвижен, тоn 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1
Если ротор вращается синхронно с магнитным полем, то скольжение S= 0.
При холостом ходе, то есть при отсутствии нагрузки на валу двигателя скольжение ничтожно мало и его можно принять равным 0. Нагрузкой на валу ротора может служить, например резец токарного станка. Он создаёт тормозной момент. При равенстве вращающего и тормозного момента двигатель будет работать устойчиво. Если нагрузка на валу увеличилась, то тормозной момент станет больше вращающего и частота вращения ротора n 2 уменьшится. Согласно формулеS = ( n 1 – n 2) / n 1 скольжение увеличится. Так как магнитное поле статора скользит относительно ротора с частотой n s = n 1 – n 2, то оно будет пересекать проводники ротора чаще, в них увеличится ток и двигательный вращающий момент, который вскоре станет равным тормозному. При уменьшении нагрузки, тормозной момент становится меньше вращающего, увеличивается n 2 и уменьшаетсяS . Уменьшается Э.Д.С и ток ротора и вращающий момент вновь равен тормозному. Магнитный поток в воздушном зазоре машины при любом изменении нагрузки остаётся примерно постоянным.
2. Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя есть зависимость
S – скольжения
n2 – частоты вращения ротора
М – развиваемого момента
I1-потребляемого тока
Р1-расходуемой мощности
СОSφ-коэффициента мощности
От полезной мощности Р2 на валу машины.
Эти характеристики снимаются при естественных условиях. Частота тока f1 и напряжение U1 остаются постоянными. Изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя S увеличивается. При холостом ходе двигателя n2≈n1, и S≈0. При номинальной нагрузке скольжение обычно составляет от 3 до 5%.
При увеличении нагрузки на валу двигателя частота вращения n2 уменьшается. Однако, изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень незначительны и не превышают 5%. Поэтому, скоростная характеристика асинхронного двигателя является жёсткой. Кривая имеет очень малый наклон к горизонтальной оси.
Вращающий момент М , развиваемый двигателем, уравновешен тормозным моментом на валу Мт и моментом М 0 , идущим на преодоление механических потерь, то есть М= Мт + М 0 =Р 2 /Ω 2 + М 0 , где Р 2 – полезная мощность двигателя, Ω 2 -угловая скорость ротора. При холостом ходе М= М 0. С увеличением нагрузки вращающий момент также увеличивается, причём за счёт некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем полезной мощности на валу.
Ток I1, потребляемый двигателем из сети неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе СОSφ-коэффициента мощности – мал. И ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение тока I1.
Графическая зависимость потребляемой двигателем мощности Р1 изображается почти прямой линией, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Зависимость СОSφ-коэффициента мощности – от нагрузки на валу двигателя следующая. При холостом ходе СОSφ мал, порядка 0,2. Так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу СОSφ возрастает, достигая наибольшего значения 0,8–0,9, в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение СОSφ, так как в следствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая КПДη имеет такой же вид как в любой машине или трансформаторе. При холостом ходе КПД=0. С увеличением нагрузки на валу двигателя КПД резко увеличивается, а затем уменьшается. Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потери мощности в обмотках статора и ротора, зависящим от нагрузки.
Рабочие характеристики асинхронного двигателя
РАБОТА ПО ЭЛЕКТРОТЕХНИКЕ
"Рабочие характеристики асинхронного двигателя"
Введение
Асинхронная электрическая машина – это электрическая машина переменного тока, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит от нагрузки. Используется в основном как двигатель и как генератор. Статор имеет пазы, в которые укладывается одно- или многофазная (чаще трёхфазная) обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания подвижного магнитного поля, вращающегося кругового- у трёхфазных и пульсирующего или вращающегося эллиптического-у однофазных машин. Ротор – вращающаяся часть электрической машины, предназначен также для создания магнитного поля, которое, взаимодействуя с полем статора, ведёт к созданию электромагнитного вращающего момента, определяющего направление преобразования энергии. У генераторов этот момент носит тормозной характер, противодействуя вращающему моменту первичного двигателя, приводящего в движение ротор. У двигателей, наоборот, этот момент является движущим, преодолевающим сопротивление приводимого во вращение ротором механизма.
Асинхронный генератор-это асинхронная электрическая машина, работающая в генераторном режиме. Вспомогательный источник электрического тока небольшой мощности и тормозное устройство (в электроприводе).
Асинхронный электродвигатель – это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель (изобретен в 1889 М.О. Доливо-Добровольским). Асинхронные электродвигатели отличаются относительной простотой конструкции и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых нагрузках. Мощность от долей Вт до десятков МВт.
1. Асинхронный двигатель
1.1 Частота вращения магнитного поля и ротора
Пусть n1 – частота вращения магнитного поля. Многофазная система переменного тока создаёт вращающееся магнитное поле, частота вращения которого в минуту n1=60f1/p, где f1 – частота тока, p – число пар полюсов, образуемых каждой фазой статорной обмотки.
n2 – частота вращения ротора. Если ротор вращается с частотой не равной частоте вращения магнитного поля (n2≠n1), то такая частота называется асинхронной. В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте.
При работе частота вращения ротора всегда меньше частоты вращения поля.
(n2< n1)
1.2 Принцип действия асинхронного двигателя
В асинхронных двигателях вращающееся магнитное поле создаётся трёхфазной системой при включении её в сеть переменного тока. Вращающееся магнитное поле статора пересекает проводники обмотки ротора и индуцирует в них э.д.с. Если обмотка ротора замкнута на какое-либо сопротивление или накоротко, то в ней под действием индуцируемой э.д.с. проходит ток. В результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем обмотки статора создаётся вращающий момент, под действием которого ротор начинает вращаться по направлению вращения магнитного поля. Для изменения направления вращения ротора необходимо поменять местами по отношению к зажимам сети любые два из трёх проводов, соединяющих обмотку статора с сетью.
1.3 Устройство асинхронного двигателя
Сердечник статора набирается из стальных пластин, толщиной 0,35 или 0,5 мм. Пластины штампуют с пазами и крепят в станине двигателя. Станину устанавливают на фундаменте. В продольные пазы статора укладывают проводники его обмотки, которые соединяют между собой так, что образуется трёхфазная система. Для подключения обмоток статора к трёхфазной сети они могут быть соединены звездой или треугольником. Это даёт возможность включить двигатель в сеть с разным напряжением. Для более низких напряжений (220/127 В) обмотка статора соединяется треугольником, для более высоких (380/220 В) – звездой. Сердечник ротора также набирают из стальных пластин толщиной 0,5 мм. Пластины штампуют с пазами и собирают в пакеты, которые крепят на валу машины. Из пакетов образуется цилиндр с продольными пазами, в которых укладывают проводники обмотки ротора. В зависимости от типа обмотки ротора асинхронные машины могут быть с фазным и короткозамкнутымротором. В короткозамкнутую обмотку нельзя включить сопротивление. В Фазной обмотке проводники соединены между собой, образуя трёхфазную систему. Обмотки трёх фаз соединены звездой. Обмотку ротора можно замкнуть на сопротивление или накоротко. Двигатели с короткозамкнутым ротором проще и дешевле, однако двигатели с фазным ротором обладают лучшими пусковыми и регулировочными свойствами (они используется при больших мощностях). Мощность асинхронных двигателей колеблется от нескольких десятков Ватт до 15000 кВт при напряжении обмотки статора до 6 кВ. Недостаток асинхронных двигателей – низкий коэффициент мощности.
1.4 Работа асинхронного двигателя под нагрузкой
n1 – частота вращения магнитного поля статора. n2 – частота вращения ротора.
n1 >n2
Магнитное поле статора вращается в том же направлении, что и ротор и скользит относительно ротора с частотой ns= n1 – n2
Отставание ротора от вращающегося магнитного поля статорахарактеризуется скольжением S= ns / n1, => S =(n1 – n2) / n1
Если ротор неподвижен, то n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Если ротор вращается синхронно с магнитным полем, то скольжение S= 0.
При холостом ходе, то есть при отсутствии нагрузки на валу двигателя скольжение ничтожно мало и его можно принять равным 0. Нагрузкой на валу ротора может служить, например резец токарного станка. Он создаёт тормозной момент. При равенстве вращающего и тормозного момента двигатель будет работать устойчиво. Если нагрузка на валу увеличилась, то тормозной момент станет больше вращающего и частота вращения ротора n2 уменьшится. Согласно формуле S =(n1 – n2) / n1 скольжение увеличится. Так как магнитное поле статора скользит относительно ротора с частотой ns= n1 – n2, то оно будет пересекать проводники ротора чаще, в них увеличится ток и двигательный вращающий момент, который вскоре станет равным тормозному. При уменьшении нагрузки, тормозной момент становится меньше вращающего, увеличивается n2 и уменьшается S. Уменьшается Э.Д.С и ток ротора и вращающий момент вновь равен тормозному. Магнитный поток в воздушном зазоре машины при любом изменении нагрузки остаётся примерно постоянным.
2. Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя есть зависимость
S – скольжения
n2 – частоты вращения ротора
М – развиваемого момента
I1-потребляемого тока
Р1-расходуемой мощности
СОSφ-коэффициента мощности
От полезной мощности Р2 на валу машины.
Эти характеристики снимаются при естественных условиях. Частота тока f1 и напряжение U1 остаются постоянными. Изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя S увеличивается. При холостом ходе двигателя n2≈n1, и S≈0. При номинальной нагрузке скольжение обычно составляет от 3 до 5%.
При увеличении нагрузки на валу двигателя частота вращения n2 уменьшается. Однако, изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень незначительны и не превышают 5%. Поэтому, скоростная характеристика асинхронного двигателя является жёсткой. Кривая имеет очень малый наклон к горизонтальной оси.
Вращающий момент М , развиваемый двигателем, уравновешен тормозным моментом на валу Мт и моментом М0 , идущим на преодоление механических потерь, то есть М= Мт + М0 =Р2/ Ω2+ М0 , где Р2 – полезная мощность двигателя, Ω 2 -угловая скорость ротора. При холостом ходе М= М0. С увеличением нагрузки вращающий момент также увеличивается, причём за счёт некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем полезной мощности на валу.
Ток I1, потребляемый двигателем из сети неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе СОSφ-коэффициента мощности – мал. И ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение тока I1.
Графическая зависимость потребляемой двигателем мощности Р1 изображается почти прямой линией, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Зависимость СОSφ-коэффициента мощности – от нагрузки на валу двигателя следующая. При холостом ходе СОSφ мал, порядка 0,2. Так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу СОSφ возрастает, достигая наибольшего значения 0,8–0,9, в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение СОSφ, так как в следствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая КПДη имеет такой же вид как в любой машине или трансформаторе. При холостом ходе КПД=0. С увеличением нагрузки на валу двигателя КПД резко увеличивается, а затем уменьшается. Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потери мощности в обмотках статора и ротора, зависящим от нагрузки.
Похожие рефераты:
Разновидности асинхронных исполнительных микродвигателей: с полым немагнитным и магнитным ротором; с короткозамкнутой обмоткой типа беличьего колеса. Схема полузакрытого паза магнитопровода. Создание вращающегося магнитного поля двухфазным статором.
Устройство трехфазной асинхронной машины, ее основные элементы, режимы и принцип работы, история создания и применение на современном этапе. Порядок и условия получения вращающегося магнитного поля. Зависимость электромагнитного момента от скольжения.
Определение приведенного к валу двигателя суммарного момента инерции редуктора, лебедки, груза. Расчет приведенного к валу момента сопротивления при подъеме, спуске. Значение мощности на валу редуктора. Причина отличия мощности при подъеме и спуске груза.
Расчет и конструирование двигателя, выбор главных размеров, расчет обмотки статора. Расчет размеров зубцовой зоны статора и выбор воздушного зазора. Моделирование двигателя в среде MatLab Power System Blockset а также с параметрами номинального режима.
Основные и резервные защиты турбогенератора.
Устройство и условное изображение синхронной трехфазной машины. Расположение полюсов магнитного поля статора и ротора. Зависимость электромагнитного момента синхронной машины от угла. схема включения синхронного двигателя при динамическом торможении.
Общие сведения об асинхронных машинах (двухобмоточных электрических машинах переменного тока). Конструкция активных частей, подшипниковых узлов, вводного устройства асинхронного микродвигателя 4АА50В2, принцип его действия, области применения и значение.
Проектирование трехфазного асинхронного электродвигателя с короткозамкнутым ротором. Выбор аналога двигателя, размеров, конфигурации, материала магнитной цепи. Определение коэффициента обмотки статора, механический расчет вала и подшипников качения.
Расчет асинхронного двигателя с короткозамкнутым ротором. Выбор главных размеров. Расчет размеров зубцовой зоны статора и воздушного зазора, ротора, намагничивающего тока. Параметры рабочего режима. Расчет потерь, рабочих и пусковых характеристик.
Общие сведения об асинхронных машинах. Общие сведения о режимах работы асинхронного двигателя. Аналитическое и графическое определение режимов работы асинхронной машины реконструкции.
Особенности разработки асинхронного электродвигателя с короткозамкнутым ротором типа 4А160S4У3 на основе обобщённой машины. Расчет математической модели асинхронного двигателя в форме Коши 5. Адекватность модели прямого пуска асинхронного двигателя.
Методика расчета магнитной цепи синхронного генератора, выбор его размеров и конфигурации, построение характеристики намагничивания машины. Определение параметров обмотки, выполнение теплового и вентиляционного расчетов, сборного чертежа генератора.
Недопустимость многократного асинхронного пуска синхронного двигателя, что приводит к значительному падению напряжения в питающей системе, к возникновению значительных динамических усилий в лобовых частях обмотки статора и тепловому старению изоляции.
Построение нагрузочной диаграммы исполнительного механизма. Выбор элементов силовой схемы. Расчет механических характеристик. Оценка необходимости применения обратной связи по скорости. Определение среднего КПД системы. Переходные процессы в приводе.
Общие сведения об устройствах автоматического регулирования возбуждения синхронных машин. Факторы, влияющие на напряжение и схема электроснабжения. Устройство токового компаундирования: необходимые изменения характеристики компаундированной машины.
Магнитная цепь двигателя. Размеры, конфигурация, материал. Сердечник статора, ротора и полюсный наконечник. Расчет магнитной цепи. Воздушный зазор, зубцы и спинка статора. Активное и индуктивное сопротивление обмотки статора для установившегося режима.
38) Механическая характеристика асинхронного двигателя.
Механическая характеристика . Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98-92,5 % частоты вращения n 1 (скольжение s ном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
Рис. 262. Механические характеристики асинхронного двигателя: а - естественная; б - при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент M max двигатель развивает при некоторое скольжении s kp , составляющем 10-20%. Отношение M max /M ном определяет перегрузочную способность двигателя, а отношение М п /М ном - его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки М вн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения M max (до точки В). Если нагрузочный момент М вн превысит момент M max , то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5-7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R 1п (кривая 2), R 2п (кривая 3) и R 3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R 2 и возрастает s кp . При этом уменьшается пусковой ток. Пусковой момент М п также зависит от R 2 . Можно так подобрать сопротивление реостата, чтобы пусковой момент М п был равен наибольшему М max .
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент М п такого двигателя значительно больше, чем момент М’ п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
НА ВСЯКИЙ СЛУЧАЙ РАБОЧУЮ ХАРАКТЕРИСТИКУ!!!
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М 2 , тока статора I 1 коэффициента полезного действия? и cos? 1 , от полезной мощности Р 2 = Р mx при номинальных значениях напряжения U 1 и частоты f 1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10-20%. Частота вращения n с ростом отдаваемой мощности Р 2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М 2 пропорционален мощности Р 2 , он меньше электромагнитного момента М на значение тормозящего момента М тр, создаваемого силами трения.
Ток статора I 1 , возрастает с увеличением отдаваемой мощности, но при Р 2 = 0 имеется некоторый ток холостого хода I 0 . К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75-0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos? 1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7-0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
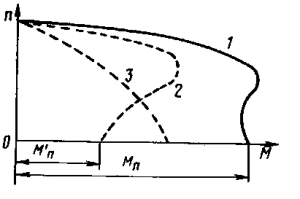 Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
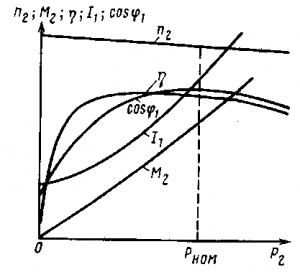 Рис.
264. Рабочие характеристики асинхронного
двигателя
Рис.
264. Рабочие характеристики асинхронного
двигателя
При нагрузках 25-50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5-0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25-0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз. Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении - не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75U ном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5-1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.

 Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов
Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование
Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки
Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки Сущность предоставления социальных услуг населению по оквэд
Сущность предоставления социальных услуг населению по оквэд