Методы регулирования частоты вращения асинхронного двигателя. Частотный регулятор для асинхронного двигателя – устройство и принцип работы
Принцип
работы ДПТ.
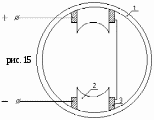
Вмашине должно быть две
основные части: первая часть – создает
магнитный поток, вторая часть – в которой
индуктируется ЭДС. Первая часть в машине
постоянного тока неподвижна. К станине
(1) крепятся штампованные полюса (2) на
которых располагается обмотка возбуждения
(3). Вторая часть – якорь. Якорь вращается.
Представляет собой цилиндр набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).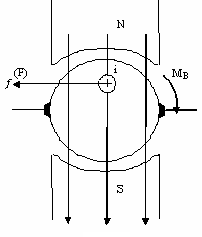
Особенности проточных машин Для большинства насосных или вентиляционных систем для регулирования давления или расхода используются клапаны, жалюзи, дроссельные клапаны или трехходовые клапаны. Если вихревой насос регулируется клапаном, путем дросселирования рабочая точка перемещается по кривой кривой производительности насоса. Требуется минимальное сокращение требуемой энергии по сравнению с потреблением номинальной рабочей точки насоса. При настройке выхода насоса путем изменения скорости вращения рабочая точка перемещается вдоль кривой системы.
Электромагнитный момент зависит
от потока и тока якоря. В генераторном
режиме электромагнитный момент является
тормозным. Уравнение равновесного
состояния моментов запишется
,
где-
механический момент на валу генератора,-
момент хх,-
электромагнитный момент. Основное
уравнение движения электропривода.
Установившийся процесс, когда,,,
Если,,.
Если,,.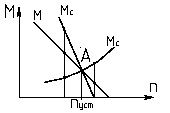
С помощью этого метода регулирования спрос на энергию падает в третьей мощности по сравнению с регулированием дросселирования! Например, для насоса требуется только одна восьмая потребляемая мощность на половину скорости. По аналогии это также относится к вентиляторам и всем другим типам насосов с переменной характеристикой крутящего момента. На графике ниже кривая эффективности также показана рядом с кривой насоса и системы. Можно отметить, что как управление дроссельной заслонкой, так и регулирование скорости вращения, рабочая точка выходит за оптимальное соотношение эффективности.
 Принцип
регулирования частоты вращения.
С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:
.
Принцип
регулирования частоты вращения.
С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:
.
Влияние корректировки на изменение эффективности насоса можно увидеть на кривой удельной энергии, показанной на рисунке. От 32 Гц вниз дополнительные потери насоса начинают перевешивать экономию энергии по сравнению с работой при номинальной производительности. Оптимальная частота устройства составляет 38 Гц. Если бы насос не контролировал скорость, энергетический баланс был бы намного хуже. На практике оказывается, что проточные машины часто не всегда работают в оптимальной рабочей точке. Например, кондиционеры должны выполнять больше работы, чем зимой зимой.
Сопротивлением в цепи якоря. Уравнения токов до и после введения сопротивления
Откуда,
т. е. токи момент уменьшается ()
. При этоми
скоростьуменьшается. С уменьшением скороститок якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости.
Регулирование частоты вращения
сопротивлением в цепи якоря осуществляется
в сторону уменьшения скорости.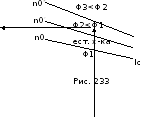
Однако, поскольку система должна быть рассчитана на максимальную потребляемую мощность, это неизбежно приводит к значительной части времени работы системы ниже номинальных параметров. Это учитывают только некоторые производители насосных и вентиляционных систем. Они проектируют систему для поддержания резерва на короткие периоды пикового спроса, но в то же время устанавливают оптимальную эффективность примерно на 70% от пропускной способности. Чтобы обеспечить успех в проектах по энергосбережению, вы должны обратиться за советом к специалистам в этой области.
Потоком. Ток якоря до и после изменения потока ,, их отношение. Уравнение5.1. моментов . Уменьшим поток, Ток якоря возрос, тогда, тои(возрастает).
Напряжением. Регулирование частоты вращения производится следующими способами: А) Система генератор-двигатель (Г-Д). Б) Тиристорный преобразователь-двигатель (ТП-Д). В) Широтно-импульсное регулирование.
У них есть необходимый опыт, чтобы избежать опасностей повышения энергоэффективности и расчета максимальной экономии для пользователя. Введение Электродвигатель представляет собой электромеханическое устройство, которое преобразует электрическую энергию в механическую энергию. Электродвигатели могут быть сгруппированы в следующие категории: двигатели постоянного тока; Двигатели переменного тока. Переменные токи, в свою очередь, классифицируются как: асинхронные; Синхронный. Независимо от типа двигателя, он состоит из двух компонентов: статора и ротора.
 А)
Система Г-Д, рис.234.
.
Увеличивая ток возбуждения генератораi вг,
возрастает поток Ф г
и Е г,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.
А)
Система Г-Д, рис.234.
.
Увеличивая ток возбуждения генератораi вг,
возрастает поток Ф г
и Е г,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.
Статор является неподвижной частью двигателя. Ротор - мобильная часть двигателя. Электродвигатель постоянного тока имеет магнитные полюса на статоре и катушки полярной катушки, которые создают магнитное поле возбуждения. Вал двигателя расположен коллектор, который меняет свой смысл тока через обмотки ротора таким образом, что поле возбуждения магнитного оказывать постоянную силу к ротору.
Электродвигатели переменного тока работают на основе принципа обратного магнитного поля. Альтернативные электродвигатели подразделяются на две основные категории: асинхронные двигатели и синхронные двигатели. Асинхронный электродвигатель представляет собой простой, надежный, простой в эксплуатации, дешевый электромобиль с хорошей производительностью и высоким стартовым моментом. Он характеризуется рабочей скоростью, которая зависит от нагрузки. Трехфазный асинхронный двигатель является наиболее часто используемым электродвигателем в электроприводах средней и большой мощности.
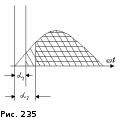
Б) Тиристорный преобразователь-двигатель. Увеличивая угол управления - площадь полупериода уменьшается, уменьшается среднее значение напряжения -U ср, а следовательно уменьшается скорость вращения.
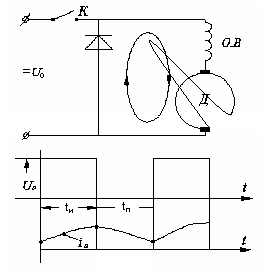
В) Широтно-импульсное регулирование.
Изменяя
время импульса t и
изменяется скважность
,
гдеt и
- время импульса; t п
- время паузы. Среднее значение U ср =U 0 .
.
Однофазный асинхронный двигатель обладает превосходными характеристиками в трехфазном режиме. Синхронный двигатель обмотка статора подается в переменный ток и ротор с обмоткой возбуждения тока, подаваемого непрерывно. Основной особенностью синхронного двигателя является то, что его скорость вращения ротора постоянна, независимо от нагрузки. Синхронный двигатель имеет преимущество по сравнению с асинхронным двигателем, как имеющий очень хороший коэффициент мощности, коэффициент мощности повышает общую электрическую установку, к которому он подключен.
6.Способы регулирования активной и реактивной мощности синхронной машины.
Способы регулирования активной и реактивной мощности синхронного генератора. Как только что видели, что если изменять возбуждение генератора, то тем самым будем изменять реактивную мощность, отдавать, либо потреблять. Регулировать активную мощность можно только изменяя механическую мощность со стороны паровой турбины, либо гидротурбины. При увеличении отдаваемой активной мощности, необходимо увеличить и механическую мощность со стороны турбины.
Синхронный двигатель используется там, где нет необходимости в изменении скорости вращения, а именно: высокоскоростные преобразователи, компрессоры, вентиляторы и т.д. однофазный синхронный двигатель обычно изготавливается как синхронный синхронный двигатель с постоянными магнитами на роторе или без них. Шаговый двигатель представляет собой тип синхронного электродвигателя полюсов с отверстиями на обеих арматурах. Пошаговые двигатели используются там, где требуется высокая точность.
Свойства двигателей Электровибромасажеры обычные конструкции и основные области применения двигателей простой конструкции, которые стоят с малым крутящим моментом и пускового тока высокой скорости почти постоянный низкий коэффициент простоя мощности и на полной скорости нагрузки регулировки их делайте с некоторым весом. Они широко используются в промышленных установках; Синхронные двигатели запускаются в асинхронных или вспомогательных приводах. Их крутящий момент увеличивается с нагрузкой, они имеют постоянную скорость.
Пуск СД. для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:1 Пуск с помощью вспомогательного двигателя; 2Асинхронный пуск двигателя.
1.Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем до n=0,95n 1 . Статор этого генератора включается параллельно в сеть с соблюдением условий этого соединения. После включения статора в сеть, с небольшой выдержкой, включают обмотку возбуждения, и двигатель втягивается в синхронизм, а вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
Они используются в промышленности как высокоскоростные двигатели с постоянной скоростью, а также как синхронные группы преобразования и компенсации. Серийные двигатели: имеют высокий пусковой момент, несущие перегрузки, пустые, скорость зависит от нагрузки. Они используются для электрического тяги, а также для насосов и вентиляторов; Производные двигатели: имеют низкий пусковой момент, не выдерживают больших перегрузок, не обматывают пустым, имеют постоянную скорость. Они используются для подъема подъемных машин, станков, требующих постоянной скорости; Смешанные дифференциальные двигатели: имеют низкий пусковой момент, постоянную скорость и используются, в частности, для ткацких установок; Дополнительные смешанные двигатели: имеют высокий пусковой момент, перегрузка медведя, и их скорость изменяется с нагрузкой.
2.
синхронный двигатель на время пуска
превращается в асинхронный. Для
возможности образования асинхронного
пускового момента в пазах полюсных
наконечников явнополюсного двигателя
помещается пусковая короткозамкнутая
обмотка. Процесс пуска синхронного
двигателя осуществляется в два этапа.
При включении обмотки статора (1) в сеть
в двигателе образуется вращающее поле,
которое наведет в короткозамкнутой
обмотке ротора (2) ЭДС. Под действием,
которой будет протекать в стержнях ток.
В результате взаимодействия вращающего
магнитного поля с током в короткозамкнутой
обмотке создается вращающий момент,
как у асинхронного двигателя. За счет
этого момента ротор разгоняется до
скольжения близкого к нулю (S=0,05),
рис. 313. На этом заканчивается первый
этап. Чтобы ротор двигателя втянулся в
синхронизм, необходимо создать в нем
магнитное поле включением в обмотку
возбуждения (3) постоянного тока
(переключив ключ К в положение 1). Так
как ротор разогнан до скорости близкой
к синхронной, то относительная скорость
поля статора и ротора небольшая. Полюса
плавно будут находить друг на друга. И
после ряда проскальзываний, противоположные
полюса притянутся, и ротор втянется в
синхронизм. После чего ротор будет
вращаться с синхронной скоростью, и
частота вращения его будет постоянной,
рис. 313. На этом заканчивается второй
этап пуска. Работа
СД при недовозбужденном и перевозбужденном
режимах(ib
=
var
).
Режим работы соответствует постоянству
момента.
при. При недовозбужденном синхронном
двигателе составляющей напряжения -Е 0
соответствует ток I,
который отстает от напряжения Uc
на угол φ.
Реактивная составляющая тока I L
будет отставать на 90 0
от вектора напряжения Uc,
т.е. этот ток чисто индуктивный. Значит,
при недовозбуждении двигатель будет
потреблять из сети индуктивный ток, а
следовательно будет потреблять из сети
и реактивную мощность.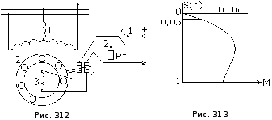
Они используются для привода прокатных станов, прессов, насосов, вентиляторов и т.д. В этой статье рассматривался объект электродвигателя. Таким образом, мы узнали, что электродвигатели двух типов: постоянного и переменного тока, которые, в свою очередь, делятся на несколько категорий. Большинство электродвигателей работают на основе электромагнитных сил, действующих на проводник тока магнитного поля. Электродвигатели, построенные в расширенном диапазоне мощности, используются во многих областях применения: от электроники до электроприводов высокой мощности.
При
увеличении возбуждения величина –Е 0 1
увеличится, а ток I
уменьшится до Ia=I 1
и будет минимальным. При этом режиме СД
будет работать с cosφ=1
и реактивная мощность, не будет ни
потребляться, ни отдаваться в сеть. При
дальнейшем увеличении тока возбуждения
составляющая напряжения будет равна
–Е 0 11 ,
а ток I 11
, будет опережать вектор напряжения
сети на угол φ 1 .
Этот режим соответствует перевозбужденному
режиму. Реактивная составляющая тока
будет емкостной (опережает вектор Uc
на 90 0).
Этот режим будет соответствовать отдаче
реактивной мощности в сеть. Этот режим
аналогичен включению статических
емкостей в сеть.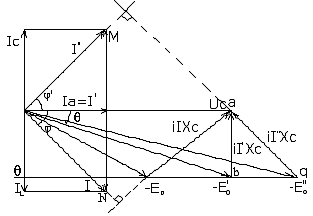
Определение и основные элементы здания
Машина переменного тока, при которой частота вращения двигателя равна скорости вращения вращающегося поля, независимо от нагрузки, называется синхронной машиной. В общем случае индуктор представляет собой ротор, и только небольшие машины из-за пространства могут быть статорами, причем машина рассматривается в этом случае с помощью обратной проводимости. Индуктор может быть с противоположными полюсами и концентрическими катушками, расположенными на них или с полными полюсами, когда обмотка возбуждения распределена в вырезах.
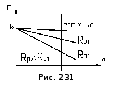
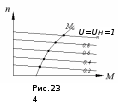
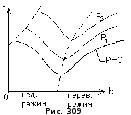
Итак видим, что если изменять ток возбуждения iB, то величина тока статора I будет изменяться по величине и по фазе, т.е. можно регулировать cosφ. Это ценное свойство и определяет использование синхронных двигателей. Зависимости тока статора I от тока возбуждения iв, I=f(iв) называются U-образные характеристики, рис. 309. Р 2 > Р 1 . Характеристики снимаются при P=const. Режим работы соответствующий току возбуждения от 0 до пунктирной линии недовозбужденный, а за пунктирной линией – перевозбужденный с отдачей реактивной энергии в сеть.
Синхронные двигатели также имеют индукционную арматуру, обмотку клеточного типа, называемую «демпфирующей обмоткой», используемой для запуска двигателей. Промышленная арматура состоит из пачек пучков, и в ее вырезах имеется трехфазная обмотка, соединенная в звезду. Широкий диапазон полномочий, а также место использования привели к многим конструктивным формам, элементы которых, помимо упомянутых выше, могут отличаться от одного типа к другому.
Области применения синхронных двигателей
Таким образом, конкретными элементами синхронного двигателя являются. Для синхронных двигателей имеется ряд условных обозначений. Синхронные машины могут работать в режиме компенсации генератора, двигателя и реактивной мощности. Синхронные генераторы являются источниками промышленной частоты на электростанциях. Тенденция заключается в том, что они достигаются с максимально возможной мощностью на единицу, чтобы избежать высокой отдачи и низкого удельного расхода материалов.
В последние 10-25 лет установилась четкая тенденция на переход от привода постоянного тока к приводу переменного тока благодаря совершенствованию законов управления двигателями переменного тока и развитию силовой электроники.
Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, существенно меньшими габаритами и массой по сравнению с двигателями постоянного тока. К недостаткам регулирования скорости можно отнести высокую сложность теории машин переменного тока и алгоритмов управления, закладываемых в преобразовательные устройства.
В качестве небольших двигателей они используются там, где требуется синхронная скорость. Синхронные компенсаторы представляют собой синхронные двигатели, которые работают в режиме ожидания и заряжают реактивную мощность в сетях, к которым они подключены, для повышения коэффициента мощности.
Принцип работы синхронного двигателя
Принцип действия генератора
Фазовые обмотки объявляются в пространствах с углом 120 °, т.е. индуцированные в трехфазных обмотках статора. Пусть обмотка статора подключается к трехфазной нагрузке соответствующих импедансов, это, а также обмотки, будет проходить через трехфазную систему тока, ток в эталонной фазе имеет вид.Наибольшее распространение получили следующие способы регулирования угловой скорости асинхронного двигателя: 1) реостатное; 2) изменением напряжения на статоре; 3) переключением числа пар полюсов; 4) изменением частоты питающего напряжения и др.
Реостатное регулирование
Схема включения АД при этом способе регулирования представлена ниже. Реостатные характеристики получаются путем введения в цепь ротора добавочного сопротивления. При этом с ростом сопротивления падает жесткость МХ.
Реакция синхронной машинной промышленности
В этом случае машина дает электроэнергию нагрузке, которая поглощается электромагнитным полем от первичного двигателя, таким образом, работая, например, с генератором. Таким образом, реакция фазового потока индукции будет смещена от потока индуктивности с тем же углом, имея выражение.
И т.д. поток этого потока будет. Две индуктивности Ψ 0 и реакция Ψ состоят и дают результирующий поток. Для более простого отслеживания основных явлений уравнения будут выводиться для синхронной машины, но для постоянного воздушного зазора, даже если некоторые функциональные особенности, характерные для синхронного синхронного синхронного двигателя, не захватываются.
Допустимый диапазон регулирования скорости при данном способе
Так как , то приближенно
![]() ,
,
где – относительная величина изменения скорости; – относительная величина изменения момента.
Из полученной формулы видно, что при равных относительных отклонениях угловой скорости и момента нагрузки диапазон регулирования . При более низком допустимом отклонении угловой скорости диапазон оказывается ещё меньше.
Уравнение напряжения для фазы индукции определяется применением правила дипольного генератора. Режимы работы, баланс мощности и выход. Электромагнитная пара развивалась, когда машина подключена к сетке. При этих упрощениях фазовая диафрагма и электромагнитная мощность трехфазного синхронного двигателя аппроксимируются.
Это альтернативная пара, поэтому со средним нулевым значением. Если синхронный двигатель работает в своей собственной сети в качестве генератора, он также требует частоты питающей сети. Из-за этого синхронный момент синхронного двигателя также называется «синхронным крутящим моментом». В режиме генератора результирующее поле объявляется после поля индуктивности. Если θ = 0, двигатель не дает или не принимает активную энергию. Если на валу машины имеется сильный крутящий момент, который имеет тенденцию уменьшать скорость вращения ротора, ось полюса ротора остается за результирующим полюсом результирующего поля, поэтому θ = 0 возникает синхронный крутящий момент, двигатель получает активную энергию от сетки и развивает крутящий момент механически на деревьях.
Потери мощности при реостатном регулировании складываются из переменных потерь, включающих потери в меди статора и ротора и во внешних резисторах роторной цепи, и постоянных – не зависящих от нагрузки. Суммарные постоянные потери в двигателе остаются примерно одинаковыми независимо от нагрузки и скорости двигателя.
Электромагнитная и механическая мощности для АД
![]() ; ,
; ,
отсюда можно определить потери в роторе
Видно, что потери пропорциональны величине скольжения и распределяются пропорционально отношению сопротивлений ротора двигателя и добавочного сопротивления в цепи ротора, поэтому двигатель при реостатном регулировании может развивать момент, равный номинальному.
Недостатками реостатного регулирования скорости являются ступенчатое регулирование скорости и использование дополнительной аппаратуры, невысокое быстродействие и большие потери энергии при регулировании.
Регулирование угловой скорости АД изменением напряжения на статоре
При изменении величины первой гармоники изменяется величина критического момента при постоянстве критического скольжения.
Такое изменение достигается использованием тиристорного преобразователя напряжения (ТПН).
Максимальный момент при уменьшении напряжения снижается пропорционально квадрату напряжения:
 ,
,
где – критический момент при сниженном напряжении; – пониженное напряжение.
Из рис. видно, что пределы регулирования скорости весьма ограничены, даже при вентиляторной нагрузке.
Для расширения диапазона используют замкнутые по скорости САР, структурная схема которой представлена на рис. ниже. В состав такой САР сходит датчик скорости (BR) и регулятор скорости, на который поступает разность между заданным и текущим значением скоростей. На выходе регулятора скорости вырабатывается сигнал, подающийся на вход системы импульсно-фазного управления, которая вырабатывает управляющие импульсы для ТПН. Особенность такого регулирования заключается в том, что все характеристики сходятся в точке синхронной скорости , поэтому, чем меньше скорость, тем выше скольжение и больше потери в двигателе. Механические характеристики двигателя при фазовом управлении в замкнутой САР скорости представлены на рис. 5.11.
Двигатель при таком способе регулирования может работать продолжительное время при условии
Допустимый момент можно найти, приравнивая допустимые потери к номинальным
![]() .
.
Кривая допустимого момента по нагреву представлена на рис.5.11.
Данный способ регулирования нельзя применять для механизмов, работающих в продолжительном режиме работе с постоянной нагрузкой. Эффективным оказывается использование фазового регулирования для механизмов, у которых статический момент зависит от скорости двигателя , например, для приводов вентиляторов, насосов, компрессоров. Этот способ также применим, когда двигатель работает на пониженных скоростях малое время относительно всего цикла работы, например, лифты. В этом случае завышение установленной мощности двигателя невелико.
Достоинством фазового управления является более низкая стоимость преобразователя (ТПН) в сравнении с преобразователем частоты (ПЧ) равной мощности, что позволяет для указанных механизмов обеспечить приемлемое качество технологического процесса без дополнительных затрат.
5.4.3. Изменение числа пар полюсов
Из выражения для угловой скорости АД:
![]() ,
,
видно, что регулирование скорости можно осуществлять изменением числа пар полюсов p обмотки статора двигателя. Так как данная величина может быть только целым числом, регулирование скорости оказывается ступенчатым.
Для данного вида регулирования изготавливаются многоскоростные АД с КЗР. В пазах сердечника статора размещают либо две независимые обмотки, либо одну полюснопереключаемую.
Различают две основные схемы переключения. Схема «звезда/двойная звезда» (рис. 5.12, I-II) обеспечивает регулирование с постоянством момента. Такую схему целесообразно применять в электроприводе с постоянно действующим моментом нагрузки при изменении частоты вращения. Схема «звезда/звезда» (рис.5.12, I-III) также даёт двукратное изменение числа пар полюсов, однако регулирование происходит при постоянстве мощности, то есть при переключении на повышенную скорость момент уменьшается в два раза. Такие схемы разумно применять в приводах, где момент сопротивления обратно пропорционален частоте вращения. Механические характеристики АД при регулировании скорости изменением числа пар плюсов представлены на рис. ниже.
Многоскоростные АД широко применялись в электроприводах, допускающих ступенчатое регулирование частоты вращения (привода лифтов, вентиляторов, станков). Достоинством такого способа является сохранение высоких экономических показателей при переходе с одной частоты вращения на другую, так как на всех ступенях переключения обмотки статора КПД и коэффициент мощности двигателя остаются практически неизменными. К недостаткам относят большую в сравнении с обычными АД сложность, завышенные габариты, большую стоимость. Кроме того, необходимость переключения обмоток статора на разное число пар полюсов требует усложнения коммутационной аппаратуры, что так же приводит к возрастанию цены электропривода в целом. В настоящее время этот способ вытесняется частотным регулированием.
Частотное регулирование скорости асинхронного двигателя
Частотный способ регулирования скорости АД является превалирующим и основным. Чем это обуславливается? В первую очередь в настоящее время развита теория машин переменного тока, что позволило найти оптимальные с некоторых позиций законы управления АД. Развитие промышленной электроники позволило в полной мере реализовать данные законы в «железе».
Существуют системы скалярного, векторного управления и системы прямого управления моментом. Выбор способа и принципа управления определяется совокупностью статических, динамических и энергетических требований к асинхронному электроприводу.
Принцип скалярного управления частотно-регулируемого асинхронного электропривода основан на изменении частоты и текущих значений модулей переменных АД (напряжений, магнитного потока, потокосцеплений и токов цепей двигателя). Этот принцип является наиболее распространённым в связи с тем, что ему свойственна техническая простота измерения и регулирования переменных АД, а так же возможность построения разомкнутых систем управления скоростью. Основной недостаток заключается в трудности реализации желаемых законов регулирования скорости и момента АД в динамических режимах.
Принцип векторного управления связан как с изменением частоты и текущих значений переменных АД, так и с взаимной ориентацией их векторов в полярной или декартовой системе координат. Благодаря контролю положения углов переменных такой способ обеспечивает полное управление АД как в статических, так и в динамических режимах, что даёт заметное улучшение качества переходных процессов по сравнению со скалярным управлением.
Системы прямого управления моментом являются продолжением и развитием систем векторного управления. Задачей прямого управления моментом является обеспечение быстрой реакции электромагнитного момента двигателя на управляющее воздействие. В отличие от векторного управления, где изменение момента производится путем воздействия на ток статора, в системе с прямым управлением моментом управляемой величиной является потокосцепление статора.
Преобразователи частоты, предназначенные для частотно-регулируемых АД, подразделяются по типу связи с питающей сетью на непосредственные ПЧ (НПЧ) и двухзвенные ПЧ (ДПЧ) с промежуточным звеном постоянного или переменного тока.
Момент АД пропорционален магнитному потоку и активной составляющей вторичного тока :
![]() ,
,
где – конструктивная постоянная АД; – угол сдвига между ЭДС и током ротора;
 .
.
Из формулы для момента видно, что уменьшение магнитного потока, являющееся следствием увеличения частоты , приведет к возрастанию , а следовательно и потерь в роторе и одновременному уменьшению допустимого момента двигателя по условиям охлаждения двигателя. Уменьшение частоты при постоянстве амплитуды напряжения , как было показано в п. 4.3.3, также не допустимо по условиям насыщения магнитной системы машины. поэтому регулирование скорости двигателя изменением частоты питающего напряжения при условии постоянства момента двигателя приемлемо только при одновременном изменении амплитуды питающего напряжения, то есть выполнении закона , что обеспечивает практически постоянный магнитный поток в двигателе.
Для реализации указанного закона управления между сетью и двигателем включается преобразователь частоты (ПЧ), обеспечивающий одновременное изменение частоты и амплитуды напряжения на двигателе. При пониженных скоростях у самовентилируемых двигателей уменьшается отвод тепла в окружающую среду, поэтому в таких случаях необходимо снижать допустимый момент на двигателе.
При частотном регулировании по причинам, обусловленными механической прочностью подшипников и элементами ротора, поднимать частоту выше . Поэтому основной способ регулирования скорости заключается в уменьшении частоты напряжения.
Для построения примерного вида механических характеристик примем, что , тогда уравнение для критического момента можно переписать следующим образом:
 .
.
Из формулы видно, что критический момент при выполнении закона остаётся постоянным. Условие пренебрежения активного сопротивления статора корректно при высоких скоростях двигателя, когда . При низких скоростях падение напряжения на активном сопротивлении статора становится сопоставимо с величиной напряжения на зажимах статора, что приводит к падению перегрузочной способности двигателя . Для того, чтобы реализовать одинаковую перегрузочную способность при частотном регулировании в области низких частот вращения используют так называемую «IR-компенсацию », которая заключается в том, что на малых скоростях делается добавка напряжения на статоре, компенсирующая .
Диапазон регулирования скорости в разомкнутых системах составляет . В замкнутых системах диапазон может быть существенно расширен.
Основные сложности, возникающие при реализации частотного управления заключаются в следующем:
1) для получения в системах ПЧ-АД свойств аналогичных (или даже превосходящих) свойства систем ТП- ДПТ необходимо получение информации о различных параметрах АД;
2) системы являются сильно нелинейными и для получения высококачественных систем необходимо вводить звенья, компенсирующие нелинейность объекта регулирования;
3) закон не является оптимальным, и требуется корректировка закона, учитывающая на валу двигателя;
4) в АД входят параметры , величина которых зависит от степени насыщения машины нелинейно. Кроме этого изменяются значения активных сопротивлений статора и ротора при изменении температуры обмоток двигателя, что также необходимо учитывать.
Несмотря на указанные сложности, современные частотные приводы успешно функционируют, обеспечивая высокое качество процесса регулирования скорости.

 Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов
Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование
Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки
Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки Сущность предоставления социальных услуг населению по оквэд
Сущность предоставления социальных услуг населению по оквэд