Пид регулирование алгоритм для написания программы. Пропорционально-интегральный дифференциальный (ПИД)- закон регулирования. Дополнительная информация
В системах с этим способом регулирования из-за наличия гистерезиса и ограниченности управляющего сигнала действительное значение параметра будет всегда периодически колебаться относительно заданной величины, т. е. всегда будет наблюдаться рассогласование. Несколько увеличить точность регулирования можно, уменьшая гистерезис переключения, но это приводит к увеличению частоты переключения выходного реле и снижению его жизненного цикла. Т. о., регуляторы этого типа непригодны для задач, где параметр регулирования отличается высокой динамикой и где требуется точное поддержание значения регулируемого параметра. Возможное применение предельных регуляторов – объекты с большой инерционностью и невысокими требованиями к точности регулирования.
Не хватайте голову за то, что она атипична, но она отлично работает для цели обучения. Пожилые люди помним, что эти регуляторы реализуются как операционный усилитель, резисторы и конденсаторы. Таким образом, каждый регулятор имеет вход для заданного значения управляемой переменной, вход для обратной связи и выходное отклонение управления, которое уже контролирует нагрев, скорость или положение. Контроллер может быть непрерывным выходом, который является нашим случаем, или с цифровыми выходами, которые можно использовать, например, для отдельных клапанов отопления и охлаждения.
ПИД-регулирование
Значительно улучшить точность регулирования можно применением ПИД-закона (Пропорционально-Интегрально-Дифференциальный закон регулирования).
Для реализации ПИД-закона используются три основные переменные:
P – зона пропорциональности, %;
I – время интегрирования, с;
D – время дифференцирования, с.
Ручная настройка ПИД-регулятора (определение значений параметров Р, I, D), обеспечивающая требуемое качество регулирования, достаточно сложна и на практике редко используется. ПИД-регуляторы серии UT/UP обеспечивают автоматическую настройку ПИД-параметров под конкретный процесс регулирования, сохраняя при этом возможность их ручной корректировки.
Конечно, вы печатаете картинку справки, вам нужно будет каждую минуту. Они могут точно видеть имена заданных значений - заданное значение, обратную связь, элементы управления и выходы. Все это технологический объект, вы можете увидеть блок данных этого объекта, предложив правую кнопку мыши.
Это выглядит так, и вы можете создать настраиваемую базу данных управления для следующей функции, где будут использоваться только пользовательские функции комментариев для реального приложения. Если вы расширите контроллер, появится другое управление контроллером. Но вы можете проверить это прямо через блок данных. Это зависит от конкретного программиста, который ближе к нему.
Пропорциональная составляющая
В зоне пропорциональности, определяемой коэффициентом Р, сигнал управления будет изменяться пропорционально разнице между уставкой и действительным значением параметра (рассогласованию):
сигнал управления = 100/P E,
где E – рассогласование.
Коэффициент пропорциональности (усиления) К является величиной обратнопропорциональной Р:
Конфигурация также возможна через указанные блоки данных. Нажмите на изображение для увеличения. Внутри контроллера можно настроить множество функций по конфигурации, но вам не нужно беспокоиться об этом, это все графически отображается, и большинство настроек можно оставить по умолчанию. Например, масштаб желаемых и фактических значений.
Это единственная настройка ключа. Диапазоны для установки всех переменных настолько широки, что для конкретного приложения очень сложно установить идеальные значения вручную. Эти значения по умолчанию также идут в некотором роде, но для реального регулирования может потребоваться очень много времени. Поэтому важно иметь автоматическую настройку, когда контроллер попытается отрегулировать себя и рассчитает соответствующий размер ответа от ответа, аналогичный оптимизации преобразователя. Ниже, а также на видео.
Зона пропорциональности определяется относительно заданной уставки регулирования, и внутри этой зоны сигнал регулирования изменяется от 0 до 100%, т. е. при равенстве действительного значения и уставки выходной сигнал будет иметь значение 50%.
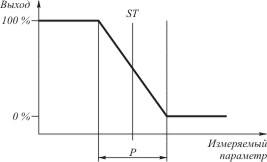
где Р – зона пропорциональности;
ST – уставка регулирования.
Например:
диапазон измерения 0…1000 °С;
уставка регулирования ST = 500 °С;
зона пропорциональности P = 5%, что составляет 50 °С (5% от 1000 °С);
при значении температуры 475 °С и ниже управляющий сигнал будет иметь величину 100%; при 525 °С и выше – 0%. В диапазоне 475…525 °С (в зоне пропорциональности) управляющий сигнал будет изменяться пропорционально величине рассогласования с коэффициентом усиления К = 100/Р = 20.
Уменьшение значения зоны пропорциональности Р увеличивает реакцию регулятора на рассогласование, т. е. малому рассогласованию будет соответствовать большее значение управляющего сигнала. Но при этом, из-за большого усиления, процесс принимает колебательный характер около значения уставки, и точного регулирования добиться не удастся. При излишнем увеличении зоны пропорциональности регулятор будет слишком медленно реагировать на образующееся рассогласование и не сможет успевать отслеживать динамику процесса. Для того, чтобы компенсировать эти недостатки пропорционального регулирования, вводится дополнительная временная характеристика – интегральная составляющая.
Он может либо находиться в режиме ожидания, либо в режиме настройки, в автоматическом режиме, а также в ручном режиме. Затем он переключается в нужный режим. Это будет, как мы упоминали, что вход на выходе. Нажмите на картинку, чтобы увеличить. Переключение режима на строку 2-6, заданное значение вручную на линию 8 и выходную линию 11а.
Также выводится значение руки переменной 0 на входе. Для автоматического режима, т.е. состояния, в котором контроллер будет регулировать, введите заданное значение в контроллере между 0% и 0%. Автоматический режим и заданное значение изменяются с 20% до 80%, давайте посмотрим, что сделает контроллер. Нажмите на изображение, чтобы увеличить.
Интегральная составляющая
Определяется постоянной времени интегрирования I, является функцией времени и обеспечивает изменение коэффициента усиления (сдвиг зоны пропорциональности) на заданном промежутке времени.
сигнал управления = 100/P E + 1/I ∫ E dt.

Как видно из рисунка, если пропорциональная составляющая закона регулирования не обеспечивает уменьшение рассогласования, то интегральная составляющая начинает на периоде времени I плавно увеличивать коэффициент усиления. Через период времени I процесс этот повторяется. Если же рассогласование мало (или быстро уменьшается), то коэффициент усиления не увеличивается и, в случае равенства значения параметра заданной уставке, принимает какое-то минимальное значение. В этом плане об интегральной составляющей говорят как о функции автоматического выключения регулирования. В случае регулирования по ПИД-закону переходная характеристика процесса будет представлять собой колебания, постепенно затухающие к значению уставки.
Это все о попытке настроить и автоматическую настройку, а не идеальную контрольную кривую. Просто им трудно получить приличные ценности. Необходима автоматическая настройка. Ввод в эксплуатацию или ввод в эксплуатацию технологического объекта. Одно окно, где все важно. Контроллер должен находиться в режиме 3, поэтому он должен управлять, а затем просто включать автоматическую настройку. Первая настройка занимает больше времени, а следующая - намного быстрее. Укажите прогресс в левой панели, а также сообщите об ошибках, если что-то не получится.
Дифференциальная составляющая
Многие объекты регулирования достаточно инерционны, т. е. имеют задержку реакции на приложенное воздействие (мертвое время) и продолжают реагировать после снятия управляющего воздействия (время задержки). ПИД-регуляторы на таких обьектах будут всегда запаздывать с включением/выключением управляющего сигнала. Для устранения этого эффекта вводится дифференциальная составляющая, определяемая постоянной времени дифференцирования D, и обеспечивается полная реализация ПИД-закона управления. Дифференциальная составляющая есть производная во времени от рассогласования, т. е. является функцией скорости изменения параметра регулирования. В случае, когда рассогласование становится постоянной величиной, дифференциальная составляющая перестает оказывать воздействие на сигнал управления.
Настройка завершена, в расширенном окне с графиками или тенденциями вы можете увидеть прогресс важных переменных. На осциллографе нам немного легче понять. Можно видеть, что значения по умолчанию совершенно разные, как показано выше. Опять же, заданное значение изменяется от 20% до 80%.
Еще один раунд тюнинга, который значительно короче. Мы можем повторить весь процесс столько раз, сколько хотим, но система запоминает только последние два значения. Это не сильно отличается, система сначала рассчитала аналогичные значения параметров. Опять тест после второй настройки, также курс предполагает, что разница не значительна.
сигнал управ. = 100/P E + 1/I ∫ E dt + D d/dt E.
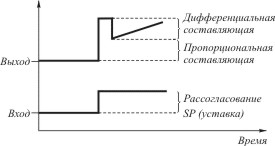
С введением дифференциальной составляющей регулятор начинает учитывать мертвое время и время задержки, заранее изменяя сигнал управления. Это позволяет значительно уменьшить колебания процесса около значения уставки и добиться более быстрого завершения переходного процесса.
Таким образом, ПИД-регуляторы, генерируя управляющий сигнал, учитывают характеристики самого объекта управления, т.е. проводят анализ рассогласования на величину, на продолжительность и скорость изменения. Иными словами, ПИД-регулятор "предвидит" реакцию объекта регулирования на сигнал управления и начинает изменять управляющее воздействие не при достижении значения уставки, а заранее.
Значительно улучшить точность регулирования можно применением ПИД-закона (Пропорционально-Интегрально-Дифференциальный закон регулирования).
Для реализации ПИД-закона используются три основные переменные:
P – зона пропорциональности, %;
I – время интегрирования, с;
D – время дифференцирования, с.
Ручная настройка ПИД-регулятора (определение значений параметров Р, I, D), обеспечивающая требуемое качество регулирования, достаточно сложна и на практике редко используется. ПИД-регуляторы серии UT/UP обеспечивают автоматическую настройку ПИД-параметров под конкретный процесс регулирования, сохраняя при этом возможность их ручной корректировки.
Пропорциональная составляющая
В зоне пропорциональности, определяемой коэффициентом Р, сигнал управления будет изменяться пропорционально разнице между уставкой и действительным значением параметра (рассогласованию):
сигнал управления = 100/P E,
где E – рассогласование.
Коэффициент пропорциональности (усиления) К является величиной обратнопропорциональной Р:
Зона пропорциональности определяется относительно заданной уставки регулирования, и внутри этой зоны сигнал регулирования изменяется от 0 до 100%, т. е. при равенстве действительного значения и уставки выходной сигнал будет иметь значение 50%.
где Р – зона пропорциональности;
ST – уставка регулирования.
Например:
диапазон измерения 0…1000 °С;
уставка регулирования ST = 500 °С;
зона пропорциональности P = 5%, что составляет 50 °С (5% от 1000 °С);
при значении температуры 475 °С и ниже управляющий сигнал будет иметь величину 100%; при 525 °С и выше – 0%. В диапазоне 475…525 °С (в зоне пропорциональности) управляющий сигнал будет изменяться пропорционально величине рассогласования с коэффициентом усиления К = 100/Р = 20.
Уменьшение значения зоны пропорциональности Р увеличивает реакцию регулятора на рассогласование, т. е. малому рассогласованию будет соответствовать большее значение управляющего сигнала. Но при этом, из-за большого усиления, процесс принимает колебательный характер около значения уставки, и точного регулирования добиться не удастся. При излишнем увеличении зоны пропорциональности регулятор будет слишком медленно реагировать на образующееся рассогласование и не сможет успевать отслеживать динамику процесса. Для того, чтобы компенсировать эти недостатки пропорционального регулирования, вводится дополнительная временная характеристика – интегральная составляющая.
Интегральная составляющая
Определяется постоянной времени интегрирования I, является функцией времени и обеспечивает изменение коэффициента усиления (сдвиг зоны пропорциональности) на заданном промежутке времени.
сигнал управления = 100/P E + 1/I ∫ E dt.
Как видно из рисунка, если пропорциональная составляющая закона регулирования не обеспечивает уменьшение рассогласования, то интегральная составляющая начинает на периоде времени I плавно увеличивать коэффициент усиления. Через период времени I процесс этот повторяется. Если же рассогласование мало (или быстро уменьшается), то коэффициент усиления не увеличивается и, в случае равенства значения параметра заданной уставке, принимает какое-то минимальное значение. В этом плане об интегральной составляющей говорят как о функции автоматического выключения регулирования. В случае регулирования по ПИД-закону переходная характеристика процесса будет представлять собой колебания, постепенно затухающие к значению уставки.
Дифференциальная составляющая
Многие объекты регулирования достаточно инерционны, т. е. имеют задержку реакции на приложенное воздействие (мертвое время) и продолжают реагировать после снятия управляющего воздействия (время задержки). ПИД-регуляторы на таких обьектах будут всегда запаздывать с включением/выключением управляющего сигнала. Для устранения этого эффекта вводится дифференциальная составляющая, определяемая постоянной времени дифференцирования D, и обеспечивается полная реализация ПИД-закона управления. Дифференциальная составляющая есть производная во времени от рассогласования, т. е. является функцией скорости изменения параметра регулирования. В случае, когда рассогласование становится постоянной величиной, дифференциальная составляющая перестает оказывать воздействие на сигнал управления.
сигнал управ. = 100/P E + 1/I ∫ E dt + D d/dt E.
С введением дифференциальной составляющей регулятор начинает учитывать мертвое время и время задержки, заранее изменяя сигнал управления. Это позволяет значительно уменьшить колебания процесса около значения уставки и добиться более быстрого завершения переходного процесса.
Таким образом, ПИД-регуляторы, генерируя управляющий сигнал, учитывают характеристики самого объекта управления, т.е. проводят анализ рассогласования на величину, на продолжительность и скорость изменения. Иными словами, ПИД-регулятор "предвидит" реакцию объекта регулирования на сигнал управления и начинает изменять управляющее воздействие не при достижении значения уставки, а заранее.
5. Передаточная функция какого звена представлена: К(р) = К/Тр

 Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов
Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование
Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки
Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки Сущность предоставления социальных услуг населению по оквэд
Сущность предоставления социальных услуг населению по оквэд