Действие магнитного поля на провод с током. Сила Ампера. Работа перемещения провода с током в постоянном магнитном поле
Для того чтобы установить природу силы в проводнике, который движется в магнитном поле, проведём эксперимент. Предположим, что в вертикальном однородном магнитном поле с индукцией () расположен горизонтальный проводник длиной (l ), который движется с постоянной скоростью () перпендикулярно вектору магнитной индукции магнитного поля. Если подсоединить к концам этого проводника чувствительный вольтметр, то увидим, что он покажет наличие разности потенциалов на концах этого проводника. Выясним, откуда берётся это напряжение. В данном случае нет контура и нет изменяющегося магнитного поля, поэтому мы не может сказать, что движение электронов в проводнике возникло в результате появления вихревого электрического поля. Когда проводник движется, как единое целое (рис. 1), у зарядов проводника и у положительных ионов, которые находятся в узлах кристаллической решётки, и у свободных электронов возникает скорость направленного движения.
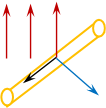
На эти заряды будет действовать сила Лоренца со стороны магнитного поля. Согласно правилу «левой руки»: четыре пальца, расположенные по направлению движения, ладонь разворачиваем так, чтобы вектор магнитной индукции входил в тыльную сторону, тогда большой палец укажет действие силы Лоренца на положительные заряды.
Сила Лоренца, действующая на заряды, равна произведению модуля заряда, который она переносит, умноженной на модуль магнитной индукции, на скорость и синус угла между вектором магнитной индукции и вектором скорости.
Эта сила будет совершать работу по переносу электронов на малые расстояния вдоль проводника.
Тогда полная работа силы Лоренца вдоль проводника будет определяться силой Лоренца, умноженной на длину проводника.
Отношение работы сторонней силы по перемещению заряда к величине перенесённого заряда по определению ЭДС.
![]() (4)
(4)
Итак, природа возникновения ЭДС индукции – это работа силы Лоренца . Однако, формулу 10.4. можно получить формально, исходя из определения ЭДС электромагнитной индукции, когда проводник перемещается в магнитном поле, пересекая линии магнитной индукции, перекрывая некоторую площадку, которую можно определить как произведение длины проводника на перемещение, которое можно выразить через скорость и время движения. ЭДС индукции по модулю равно отношению изменения магнитного потока ко времени.
Модуль магнитной индукции постоянный, но изменяется площадь, которая покрывает проводник.
После подстановки, выражения в формулу 10.5. и сокращения получим:
Сила Лоренца, действующая вдоль проводника, за счёт чего происходит перераспределение зарядов – это лишь одна составляющая сил. Также имеется вторая составляющая, которая возникает именно в результате движения зарядов. Если электроны начинают перемещаться по проводнику, а проводник находится в магнитном поле, то тогда начинает действовать сила Лоренца, и направлена она будет против движения скорости проводника. Таким образом, суммирующая сила Лоренца будет равна нулю.
Полученное выражение для ЭДС индукции, возникающей при движении проводника в магнитном поле, можно получить и формально, исходя из определения. ЭДС индукции равно скорости изменения магнитного потока за единицу времени, взятого со знаком минус.
![]()
![]()
Когда неподвижный проводник находится в изменяющемся магнитном поле и когда сам проводник движется в постоянном магнитном поле, возникает явление электромагнитной индукции . И в том, и в другом случае возникает ЭДС индукции. Однако природа этой силы различна.
- Касьянов В.А., Физика 11 кл.: Учебн. для общеобразоват. учреждений. – 4-е изд., стереотип. – М.: Дрофа, 2004. – 416 с.: ил., 8 л. цв. вкл.
- Тихомирова С.А., Яровский Б.М., Физика 11. – М.: Мнемозина.
- Генденштейн Л.Э., Дик Ю.И., Физика 11. – М.: Мнемозина.
- Fizportal.ru ().
- Eduspb.com ().
- Классная физика ().
- Касьянов В.А., Физика 11 кл.: Учебн. для общеобразоват. учреждений. – 4-е изд., стереотип. – М.: Дрофа, 2004. – 416 с.: ил., 8 л. цв. вкл., ст. 115, з. 1, 3, 4, ст. 133, з. 4.
- Вертикальный металлический стержень длиной 50 см движется горизонтально со скоростью 3 м/с в однородном магнитном поле с индукцией 0,15 Тл. Линии индукции магнитного поля направлены горизонтально под прямым углом к направлению вектора скорости стержня. Чему равна ЭДС индукции в стержне?
- С какой минимальной скоростью необходимо двигать в однородном магнитном поле с магнитной индукцией 50 мТл стержень длиной 2 м, чтобы в стержне возникла ЭДС индукции 0,6 В?
- * Квадрат, изготовленный из провода длиной 2 м, движется в однородном магнитном поле с индукцией 0,3 Тл (рис. 2). Какова ЭДС индукции в каждой со сторон квадрата? Общая ЭДС индукции в контуре? υ = 5 м/с, α = 30°.

Направление магнитных силовых линий можно определить по правилу буравчика. Если поступательное движение буравчика (рис. 27) совместить с направлением тока в проводнике, то вращение его рукоятки укажет направление силовых линий магнитного поля вокруг проводника. Чем больше ток, проходящий по проводнику, тем сильнее возникающее вокруг него магнитное поле. При изменении направления тока магнитное поле также изменяет свое направление.
По мере удаления от проводника магнитные силовые линии располагаются реже.
Способы усиления магнитных полей. Для получения сильных магнитных полей при небольших токах обычно увеличивают число проводников с током и выполняют их в виде ряда витков; такое устройство называют катушкой.
При проводнике, согнутом в виде витка (рис. 28,а), магнитные поля, образованные всеми участками этого проводника, будут внутри витка иметь одинаковое направление. Поэтому интенсивность магнитного поля внутри витка будет больше, чем вокруг прямолинейного проводника. При объединении витков в катушку магнитные поля,  созданные отдельными витками, складываются (рис. 28,б) и их силовые линии соединяются в общий магнитный поток. При этом концентрация силовых линий внутри катушки возрастает, т. е. магнитное поле внутри нее усиливается. Чем больше ток, проходящий через катушку, и чем больше в ней витков, тем сильнее создаваемое катушкой магнитное поле.
созданные отдельными витками, складываются (рис. 28,б) и их силовые линии соединяются в общий магнитный поток. При этом концентрация силовых линий внутри катушки возрастает, т. е. магнитное поле внутри нее усиливается. Чем больше ток, проходящий через катушку, и чем больше в ней витков, тем сильнее создаваемое катушкой магнитное поле.
Катушка, обтекаемая током, представляет собой искусственный электрический магнит. Для усиления магнитного поля внутрь катушки вставляют стальной сердечник; такое устройство называется электромагнитом.
18. Магнитные свойства различных веществ.
Все вещества в зависимости от магнитных свойств делят на три группы: ферромагнитные, парамагнитные и диамагнитные.
К ферромагнитным материалам относят железо, кобальт, никель и их сплавы. Они обладают высокой магнитной проницаемостью µ ихорошо притягиваются к магнитам и электромагнитам.
К парамагнитным материалам относят алюминий, олово, хром, марганец, платину, вольфрам, растворы солей железа и др. Парамагнитные материалы притягиваются к магнитам и электромагнитам во много раз слабее, чем ферромагнитные материалы.
Диамагнитные материалы к магнитам не притягиваются, а, наоборот, отталкиваются. К ним относят медь, серебро, золото, свинец, цинк, смолу, воду, большую часть газов, воздух и пр.
Магнитные свойства ферромагнитных материалов. Ферромагнитные материалы благодаря их способности намагничиваться широко применяют при изготовлении электрических машин, аппаратов в других электротехнических установок.
Кривая намагничивания . Процесс намагничивания ферромагнитного материала можно изобразить в виде кривой намагничивания (рис. 31), которая представляет собой зависимость индукции В от напряженности Н магнитного поля (от намагничивающего тока I ).
Кривую намагничивания можно разбить на три участка: О-а
, на котором магнитная индукция возрастает почти пропорционально намагничивающему току; а-б
, на котором рост магнитной индукции замедляется, и участок магнитного насыщения за точкой б
, где  зависимость В
от Н
становится опять прямолинейной, но характеризуется медленным нарастанием магнитной индукции при увеличении напряженности поля.
зависимость В
от Н
становится опять прямолинейной, но характеризуется медленным нарастанием магнитной индукции при увеличении напряженности поля.
 Перемагничивание ферромагнитных материалов, петля гистерезиса
. Большое практическое значение, особенно в электрических машинах и установках переменного тока, имеет процесс перемагничивания ферромагнитных материалов. На рис. 32 показан график изменения индукции при намагничивании и размагничивании ферромагнитного материала (при изменении намагничивающего тока I
. Как видно из этого графика, при одних и тех же значениях напряженности магнитного поля магнитная индукция, полученная при размагничивании ферромагнитного тела (участок а-б-в
), будет больше индукции, полученной при намагничивании (участки О-а
и д-а
). Когда намагничивающий ток будет доведен до нуля, индукция в ферромагнитном материале не уменьшится до нуля, а сохранит некоторое значение В r
, соответствующее отрезку О-б
. Это значение называется остаточной индукцией.
Перемагничивание ферромагнитных материалов, петля гистерезиса
. Большое практическое значение, особенно в электрических машинах и установках переменного тока, имеет процесс перемагничивания ферромагнитных материалов. На рис. 32 показан график изменения индукции при намагничивании и размагничивании ферромагнитного материала (при изменении намагничивающего тока I
. Как видно из этого графика, при одних и тех же значениях напряженности магнитного поля магнитная индукция, полученная при размагничивании ферромагнитного тела (участок а-б-в
), будет больше индукции, полученной при намагничивании (участки О-а
и д-а
). Когда намагничивающий ток будет доведен до нуля, индукция в ферромагнитном материале не уменьшится до нуля, а сохранит некоторое значение В r
, соответствующее отрезку О-б
. Это значение называется остаточной индукцией.
Явление отставания, или запаздывания, изменений магнитной индукции от соответствующих изменений напряженности магнитного поля называется магнитным гистерезисом, а сохранение в ферромагнитном материале магнитного поля после прекращения протекания намагничивающего тока - остаточным магнетизмом.
 При изменении направления намагничивающего тока можно полностью размагнитить ферромагнитное тело и довести магнитную индукцию в нем до нуля. Обратная напряженность Н с
, при которой индукция в ферромагнитном материале уменьшается до нуля, называется коэрцитивной силой.
Кривую О-а
, получающуюся при условии, что ферромагнитное вещество было предварительно размагничено, называют первоначальной кривой намагничивания. Кривую изменения индукции называют петлей гистерезиса.
При изменении направления намагничивающего тока можно полностью размагнитить ферромагнитное тело и довести магнитную индукцию в нем до нуля. Обратная напряженность Н с
, при которой индукция в ферромагнитном материале уменьшается до нуля, называется коэрцитивной силой.
Кривую О-а
, получающуюся при условии, что ферромагнитное вещество было предварительно размагничено, называют первоначальной кривой намагничивания. Кривую изменения индукции называют петлей гистерезиса.
Влияние ферромагнитных материалов на распределение магнитного поля . Если поместить в магнитное поле какое-либо тело из ферромагнитного материала, то магнитные силовые линии будут входить и выходить из него под прямым углом. В самом теле и около него будет иметь место сгущение силовых линий, т. е. индукция магнитного поля внутри тела и вблизи него возрастает. Если выполнить ферромагнитное тело в виде кольца, то во внутреннюю его полость магнитные силовые линии практически проникать не будут (рис. 33) и кольцо будет служить магнитным экраном, защищающим внутреннюю полость от влияния магнитного поля. На этом свойстве ферромагнитных материалов основано действие различных экранов, защищающих электроизмерительные приборы, электрические кабели и другие электротехнические устройства от вредного воздействия внешних магнитных полей.
нергетический баланс асинхронного
двигателя
Асинхронный двигатель
потребляет из сети активную и реактивную
мощность. Рассмотрим каждую из
них.
Активная мощность(11.26)
Часть
этой мощности теряется в виде электрических
потерь в активном сопротивлении
обмотки ,
(11.27)
часть – в виде магнитных потерь
,
(11.27)
часть – в виде магнитных потерь в
магнитопроводе статора
в
магнитопроводе статора .
(11.28)
Оставшаяся часть мощности
.
(11.28)
Оставшаяся часть мощности (11.29)
представляет
собой электромагнитную мощность,
передаваемую с помощью магнитного поля
из статора в ротор. На схеме замещения
(рис. 11.6 в) этой мощности соответствует
мощность, пропорциональная активному
сопротивлению.
Поэтому
(11.29)
представляет
собой электромагнитную мощность,
передаваемую с помощью магнитного поля
из статора в ротор. На схеме замещения
(рис. 11.6 в) этой мощности соответствует
мощность, пропорциональная активному
сопротивлению.
Поэтому![]() .
(11.30)
Другая часть этой мощности
теряется в виде электрических потерь
.
(11.30)
Другая часть этой мощности
теряется в виде электрических потерь в
активном сопротивленииобмотки
ротора
в
активном сопротивленииобмотки
ротора .
(11.31)
Остальная часть электромагнитной
мощности преобразуется в механическую
мощностьротора
.
(11.31)
Остальная часть электромагнитной
мощности преобразуется в механическую
мощностьротора (11.32)
или,
с учетом уравнений (11.30) и (11.31)
(11.32)
или,
с учетом уравнений (11.30) и (11.31)![]() .
(11.33)
Полезная механическая мощностьна
валу двигателя меньше механической
мощностина
величину механическихи
добавочных потерь
.
(11.33)
Полезная механическая мощностьна
валу двигателя меньше механической
мощностина
величину механическихи
добавочных потерь![]() .
(11.34)
Из уравнений (11.30)…(11.32) следует,
что,
(11.35)
.
(11.34)
Из уравнений (11.30)…(11.32) следует,
что,
(11.35)![]() .
(11.36)
Таким образом, активная мощностьпредставляет
собой среднюю мощность преобразования
в двигателе электрической энергии,
потребляемой из сети, в механическую,
тепловую и другие виды энергии. Процесс
преобразований активной энергии в
режиме двигателя изображен на рис. 11.8
а в виде энергетической диаграммы.
Сумма
потерь в двигателевычитается
из потребляемой мощности и определяет
полезную мощность на валу
.
(11.36)
Таким образом, активная мощностьпредставляет
собой среднюю мощность преобразования
в двигателе электрической энергии,
потребляемой из сети, в механическую,
тепловую и другие виды энергии. Процесс
преобразований активной энергии в
режиме двигателя изображен на рис. 11.8
а в виде энергетической диаграммы.
Сумма
потерь в двигателевычитается
из потребляемой мощности и определяет
полезную мощность на валу![]() .
. а)
б)
Рис. 11.8
КПД двигателя
а)
б)
Рис. 11.8
КПД двигателя .
(11.37)
Непременным условием работы
асинхронного двигателя является
потребление реактивной мощности
.
(11.37)
Непременным условием работы
асинхронного двигателя является
потребление реактивной мощности![]() .
(11.38)
Часть этой мощности расходуется
на создание магнитных полей рассеяния.
(11.39)
Оставшаяся мощность
.
(11.38)
Часть этой мощности расходуется
на создание магнитных полей рассеяния.
(11.39)
Оставшаяся мощность![]() (11.40)
расходуется
на создание основного магнитного потока,
а мощность(11.41)
расходуется
на создание полей рассеяния в
роторе.
Диаграмма реактивных
мощностей изображена на рис. 11.8 б.
(11.40)
расходуется
на создание основного магнитного потока,
а мощность(11.41)
расходуется
на создание полей рассеяния в
роторе.
Диаграмма реактивных
мощностей изображена на рис. 11.8 б.
28. Пуск и регулирование скорости асинхронного двигателя. Способы пуска асинхронных двигателей
Общая характеристики вопроса. Прямой пуск. При рассмотрений возможных способен пуска и ход асинхронных двигателей необходимо учитывать следующие основные положения: 1) двигатель должен развивать при пуске достаточно большой пусковой момент, который должен быть больше статического момента сопротивления на валу, чтобы ротор двигателя мог прийти во вращение и достичь номинальной скорости вращения; 2) пусковой ток должен быть ограничен таким значением, чтобы не происходило повреждения двигателя и нарушения нормального режима работы сети; 3) схема пуска должна быть по возможности простой, а число и стоимость пусковых устройств -- малыми.
При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его вторичной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичной цепи обычно несколько больше, чем во вторичной. При частых пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает опасность перегрева обмоток двигателя. Подробно динамика движения электропривода и энергетические соотношения при пуске рассматриваются в курсах электропривода. Число пусков асинхронного двигателя в час, допустимое по условиям его нагрева, тем больше, чем меньше номинальная мощность двигателя и чем меньше соединенные с его валом маховые массы. Двигатели мощностью 3--10 кВт в обычных условиях допускают до 5--10 включений в час.
Асинхронные двигатели с короткозамкнутым ротором проще по устройству и обслуживанию, а также дешевле и надежнее в работе, чем двигатели с фазным ротором.
Поэтому всюду, где это возможно, применяются двигатели с короткозамкнутым ротором и подавляющее большинство находящихся в эксплуатации асинхронных двигателей являются двигателями с короткозамкнутым ротором.
Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора
При этом пусковой ток двигателя Iп = (4 - 7) Iн.
Современные асинхронные двигатели с короткозамкнутым ротором проектируются с таким расчетом, чтобы они по значению возникающих при пуске электродинамических усилий, действующих на обмотки, и по условиям нагрева обмоток допускали прямой пуск. Поэтому прямой пуск всегда возможен, когда сеть достаточно мощна и пусковые токи двигателей не вызывают недопустимо больших падений напряжения в сети (не более 10--15%). Современные энергетические системы, сети и сетевые трансформаторные подстанции обычно имеют токмо мощности, что в подавляющем большинстве случаев возможен прямой пуск асинхронных двигателей.
Нормальным способом пуска двигателей с короткозамкнутым ротором поэтому является прямой пуск.
Нередко таким образом осуществляется пуск двигателей мощностью в тысячи киловатт.
Если по условиям падения напряжения в сети прямой пуск двигателя с короткозамкнутым ротором невозможен, применяются различные способы пуска двигателя при пониженном напряжении (рис. 28-1, б, в и г). Однако при этом пропорционально квадрату напряжения на зажимах обмотки статора или квадрату пускового тока двигателя Понижается также пусковой момент, что является недостатком пуска при пониженном напряжении.
Поэтому эти способы пуска применимы, когда возможен пуск, двигателя на холостом ходу или под неполной нагрузкой.
Необходимость пуска при пониженном напряжении встречается чаще всего у мощных высоковольтных двигателей. Реакторный пуск осуществляется согласно схеме рис. 28-1, б. Сначала включается выключатель В1, и двигатель получает питание через трехфазный реактор (реактивную или индуктивную катушку) Р, сопротивление которого хр ограничивает значение пускового тока. По достижении нормальной скорости вращения включается выключатель В2, который шунтирует реактор, в результате чего на двигатель подается нормальное напряжение сети.
Пусковые реакторы строятся обычно с ферромагнитным сердечником (см. § 18-4) и рассчитываются по нагреву только на кратковременную работу, что позволяет снизить их массу и стоимость.
Для весьма мощных двигателей применяются также реакторы без ферромагнитного сердечника, с обмотками, укрепленными на бетонном каркасе.
Выключатель В1 выбирается на такую отключающую мощность, которая позволяет отключить двигатель при глухом коротком замыкании за выключателем, а выключатель * В2 может иметь низкую отключающую мощность. Если составляющие сопротивления короткого замыкания двигателя равны rк и хк, то начальный пусковой ток при прямом пуске
а при реакторном пуске, при пренебрежении активным сопротивлением реактора,
Следовательно, при реакторном пуске "начальный" пусковой ток уменьшается в
раз. Во столько же раз уменьшается также напряжение на зажимах двигателя в начальный момент пуска. Начальный пусковой момент при реакторном пуске Мп.р уменьшается по сравнению с моментом при прямом пуске Мп.п в
В приведенных соотношениях не учитывается изменение величины хк при изменении пускового тока. При необходимости его нетрудно учесть. Автотрансформаторный пуск осуществляется по схеме рис. 28-1, в в следующем порядке. Сначала включаются выключатели В1 и В2, и на двигатель через автотрансформатор АТ подается пониженное напряжение. После достижения двигателем определенной, скорости выключатель В2 отключается, и двигатель получает питание через часть обмотки автотрансформатора АТ который в этом случае работает как реактор. Наконец включается выключатель ВЗ, в результате чего двигатель получает полное напряжение.
Выключатель В1 должен быть выбран на отключающую мощность при коротком замыкании, а выключатели В2 и ВЗ могут иметь меньшие отключающие мощности. Пусковые автотрансформаторы рассчитываются на кратковременную работу и обычно имеют ответвления, соответствующие значениям вторичного напряжения, равным 73, 64 и 55% от первичного при прямой схеме включения и 45, 36 и 27% при обратной схеме включения (рис. 28-2). В каждом конкретном случае выбирается подходящая ступень напряжения.
Если пусковой автотрансформатор понижает пусковое напряжение двигателя к kат раз, то пусковой ток в двигателе или на стороне НН автотрансформатора Iп.д уменьшается также в kат раз, а пусковой ток на стороне ВН автотрансформатора или в сети Iп.с уменьшается в раз. Пусковой момент Мп, пропорциональный квадрату напряжения на зажимах двигателя, уменьшается также в раз.
Таким образом, при автотрансформаторном пуске Мп и Iп.с уменьшаются в одинаковое число раз. В то же время при реакторном пуске пусковой ток двигателей Iп.д является также пусковым током в сети Iп.с и пусковой момент Мп уменьшается быстрее пускового тока (в квадратичном отношении). Поэтому при одинаковых значениях Iп.c при автотрансформаторном пуске пусковой момент будет больше. Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры.
Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
Пуск переключением «звезда -- треугольник» (рис. 28-1, г) может применяться в случаях, когда выведены все шесть концов обмотки статора и двигатель нормально работает с соединением обмотки статора в треугольник, например, когда двигатель на 380/220 В и с соединением обмоток Y/Д работает от сети 220 В. В этом случае при пуске обмотка статора включается в звезду (нижнее положение переключателя П на рис. 28-1, г), а при достижении нормальной скорости вращения переключается в треугольник (верхнее положение переключателя П на рис. 28-1, г). При таком способе пуска по сравнению с прямым пуском при соединении обмотки в треугольник напряжение фаз обмоток уменьшается в раза, пусковой момент уменьшается в =3 раза, пусковой ток в фазах обмотки уменьшается в раза, а в сети -- в =3 раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при.
Недостатком этого способа - пуска по сравнению с реакторным и автотрансформаторным являетсй то, что при пусковых переключениях цепь двигателя разрывается, что связана с возникновением коммутационных перенапряжений. Этот способ ранее широко применялся при пуске низковольтных двигателей, однако с увеличением мощности сетей потерял свое прежнее значение и в настоящее время используется сравнительно редко.
Пуск двигателя с фазным ротором с помощью пускового реостата. Двигатели с фазным ротором применяются значительно реже двигателей с короткозамкнутым ротором. Они используются в следующих случаях: 1) когда двигатели с короткозамкнутым ротором неприемлемы по условиям регулирования их скорости вращения (см. § 28-2); 2) когда статический момент сопротивления на валу при пуске МСТ велик и поэтому асинхронный двигатель с коротко-замкнутым ротором с пуском при пониженном напряжении неприемлем, а прямой пуск такого двигателя недопустим по условиям воздействия больших пусковых токов на сеть; 3) когда приводимые в движение массы настолько велики, что выделяемая во вторичной цепи двигателя тепловая энергия вызывает недопустимый нагрев обмотки ротора в виде беличьей клетки.
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора (рис 28-3). Применяются проволочные, с литыми чугунными элементами, а также жидкостные реостаты. По условиям нагрева реостаты рассчитываются на кратковременную работу. Сопротивления металлических реостатов для охлаждения обычно помещают в бак с трансформаторным маслом. Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически (в автоматизированных установках) с помощью контакторов или контроллера с электрическим приводом. Жидкостный реостат представляет собой сосуд с электролитом (например, водный раствор соды или поваренной соли), в который опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов. Рассмотрим пуск двигателя с фазным ротором с помощью ступенчатого металлического реостата (рис. 28-3), управляемого контакторами К.
Перед пуском щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. Далее в процессе пуска
поочередно включаются контакторы КЗ, К2, К1. Характеристики вращающего момента двигателя М = f (s) и вторичного тока I2 = = f (s): при работе на разных ступенях реостата изображены на рис. 28-4, а и б. Предположим, что сопротивления ступеней пускового реостата и интервалы времени переключения ступеней подобраны так, что момент двигателя М при пуске меняется в пределах от некоторого Ммакс до некоторого Ммин и при включении в сеть Мп = Ммакс > Мст (кривая 3 на рис. 28-4, а). В начале пуска двигатель работает по характеристике 3, ротор приходит во вращение, скольжение s начинает уменьшаться, и при s = s3, когда М -- Ммин,
производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s = s3 до s = s2, а момент -- от значения М = Ммакс до М = Ммин. Затем производится переключение на первую ступень и т. д. После выключения последней ступени реостата двигатель переходит на работу по естественной характеристике 0 и достигает установившейся скорости. При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается и пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов. При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Число " ступеней пускового реостата с целью упрощения схемы пуска и удешевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2--3 ступени).
Пусковые характеристики асинхронного двигателя при реостатном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов.
Самозапуск асинхронных двигателей. В электрических сетях в результате, коротких замыканий случаются кратковременные, длительностью до нескольких секунд, большие понижения напряжения или перерывы питания. Включенные в сеть асинхронные двигатели при этом начинают затормаживаться и чаще всего полностью останавливаются. При восстановлении напряжения начинается одновременный самозапуск не отключившихся от сети двигателей. Такой самозапуск двигателей способствует быстрейшему восстановлению нормальной работы производственных механизмов и поэтому целесообразен, а в ряде случаев даже чрезвычайно желателен. Однако одновременный самозапуск большого числа асинхронных двигателей загружает сеть весьма большими токами, что вызывает в ней большие падения напряжения и задерживает процесс восстановления нормального напряжения. Время самозапуска двигателей при этом увеличивается, а в ряде случаев значение пускового момента недостаточно для пуска двигателя. Кроме того самозапуск некоторых двигателей в подобных условиях недопустим или невозможен (например, двигатели с фазным ротором с пуском с помощью реостата и двигатели с короткозамкнутым ротором с пуском с помощью реакторов и автотрансформаторов, не снабженные специальной автоматической аппаратурой для автоматического самозапуска). Поэтому целесообразно возможность самозапуска использовать только для двигателей наиболее ответственных производственных механизмов, а все остальные двигатели снабдить релейной защитой для их отключения от сети при глубоких падениях напряжения.
Самозапуск асинхронных двигателей широко применяется для двигателей механизмов электрических станций.

 Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов
Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование
Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки
Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки Сущность предоставления социальных услуг населению по оквэд
Сущность предоставления социальных услуг населению по оквэд