Из чего состоит электродвигатель постоянного тока. Управление двигателем постоянного тока. Блок управления двигателем постоянного тока
Владимир Рентюк, Запорожье, Украина
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель - электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра - это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
Мад Акрам Ахмад, Камал Кишор, Панкая Рай. Математическая модель процесса была разработана с использованием реальных данных завода, а затем были разработаны обычные контроллеры и контроллер нечеткой логики. Проведен сравнительный анализ оценки эффективности всех контроллеров.
Параметры контроллера обычно настраиваются с использованием метода частотной характеристики Циглера-Николса. Однако для того, чтобы реализовать процедуру настройки, необходимо ввести систему в режим колебаний. Но не всегда возможно получить большую часть технологических установок в колебаниях.
К двигателям постоянного тока относятся два типа - это привычные для нас коллекторные двигатели и бесколлекторные (шаговые) двигатели. В первых переменное магнитное поле, обеспечивающее вращение вала двигателя, образуется обмотками ротора, которые запитываются через щеточный коммутатор - коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор. Статор может быть изготовлен как из системы постоянных магнитов, так и из электромагнитов. Во втором типе электродвигателей обмотки образуют неподвижную часть двигателя (статор), а ротор сделан из постоянных магнитов. Здесь переменное магнитное поле образуется путем коммутации обмоток статора, которая выполняется внешней управляющей схемой. Шаговые двигатели («stepper motor» в английском написании) значительно дороже коллекторных. Это достаточно сложные устройства со своими специфическими особенностями. Их полное описание требует отдельной публикации и выходит за рамки данной статьи. Для получения более полной информации по двигателям этого типа и их схемам управления можно обратиться, например, к .
В управлении технологическими процессами системы управления на основе моделей в основном используются для получения желаемых заданных значений и устранения небольших внешних возмущений. Внутренний дизайн модели управления основан на том факте, что система управления содержит некоторое представление о процессе, который должен контролироваться, тогда может быть достигнут совершенный контроль. Итак, если архитектура управления была разработана на основе точной модели процесса, то идеальное управление математически возможно.
Одним из важнейших преимуществ нечеткого управления является то, что он может быть успешно применен для управления нелинейными сложными системами с использованием опыта оператора или управления инженерными знаниями без какой-либо математической модели установки. Электродвигатели постоянного тока преобразуют электрическую энергию в механическую энергию через взаимодействие двух магнитных полей. Одно поле создается магнитом полюса, другое поле создается электрическим током, протекающим в обмотках двигателя.
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три - это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Уравнение напряжения якоря определяется. Уравнение для обратной ЭДС двигателя будет. Теперь уравнение баланса момента будет дано. Соединим верхние уравнения вместе. Тогда соотношение между частотой вращения ротора и приложенным напряжением якоря представлено передаточной функцией.
Механическая инерция = 01 кг. На основе книги данных передаточная функция. Пропорционально-интегрально-производный контроллер. Это смещение может быть устранено интегральным действием управления. Интегральное управление удаляет смещение, но может привести к колебательному отклику медленно уменьшающейся амплитуды или даже увеличения амплитуды, оба из которых являются ошибками, инициирует раннее коррекционное действие и стремится повысить стабильность системы.
Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, . Возможные варианты такой схемы представлены на Рисунке 2.
Циглер и Николс предложили правила определения значений на основе характеристик переходного отклика данного завода. При таком способе настройки критический коэффициент усиления индуцируется на переднем пути системы управления. Высокое значение коэффициента усиления приводит систему к грани неустойчивости. Он создает колебания и от колебаний, вычисляется значение частоты и времени.
Таблица 1. Методы настройки на основе колебаний на замкнутом контуре. Внутренний контроллер модели основан на инверсии модели процесса, которую мы пытаемся контролировать. Если мы каскадируем функцию передачи процесса с помощью контроллера, который является точным обратным процессу, то эффективное усиление становится единицей, и у нас есть идеальное отслеживание заданных значений. Основной особенностью внутреннего контроллера модели является то, что модель процесса находится параллельно с фактическим процессом.
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На Рисунке 2 он обозначен как R LIM . Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на Рисунке 2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на Рисунке 2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором - минимальную. Что выбрать - зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12 В; максимальный рабочий ток 1 А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5 А до 1.5 А (см. спецификацию ; имеются аналогичные ИМС и с бóльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением V IN и выходным V OUT , равной 3 В, будет рассеиваться мощность не менее
Внутренний контроллер модели обеспечивает прозрачную структуру для проектирования и настройки системы управления. Рис. 2. Схема управления внутренним модулем. Контроллер использовался для управления процессом. Модель является точным представлением процесса, тогда ясно, что выход всегда будет равным заданной точке. Обратите внимание, что эта идеальная управляющая производительность достигается без обратной связи.
Где функция нижнего пропуска, определяемая как. Здесь мы рассмотрим фильтр нижних частот 2-го порядка. Хорошее эмпирическое правило состоит в том, чтобы выбрать λ в два раза быстрее, чем отклик с открытым контуром. Таблица Лингвистические переменные. Таблица Правило базы для контроллера нечеткой логики.
P = (V IN - V OUT)×I = 3×1 = 3 Вт.
Таким образом, нужен радиатор. Опять вопрос - на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5 В (см. Рисунок 3), и она составит почти 5.0 Вт!
Нечеткие контроллеры проектируются с двумя входными переменными, ошибкой и изменением ошибки и одной выходной переменной. Основанная на Маддани система нечеткого вывода использует линейную функцию членства для обоих входов и выходов. Для контроллера нечеткой логики входными переменными являются ошибка и скорость ошибки, а выходная переменная - выход контроллера. Треугольные функции членства используются для входных переменных и выходной переменной. Каждая переменная имеет 7 функций принадлежности.
Таким образом, было создано всего 49 правил. Структура базы правил обеспечивает управление отрицательной обратной связью для поддержания стабильности при любых условиях. Лингвистические переменные для ошибки, скорости ошибки и выхода контроллера приведены в таблице.
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25 А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
Выход из положения - использовать для управления метод широтно-импульсной модуляции (ШИМ). Он, действительно, самый распространенный. Его суть - подача на двигатель промодулированных по длительности однополярных прямоугольных импульсов. Согласно теории сигналов, в структуре такой последовательности имеется постоянная составляющая, пропорциональная отношению τ/T, где: τ - длительность импульса, а T - период последовательности. Вот она-то и управляет скоростью двигателя, который выделяет ее как интегратор в этой системе. Поскольку выходной каскад регулятора на основе ШИМ работает в ключевом режиме он, как правило, не нуждается в больших радиаторах для отвода тепла, даже при относительно больших мощностях двигателя, и КПД такого регулятора несравненно выше предыдущего. В ряде случаев можно использовать понижающие или повышающие DC/DC-преобразователи, но они имеют ряд ограничений, например, по глубине регулировки выходного напряжения и минимальной нагрузке. Поэтому, как правило, чаще встречаются иные решения. «Классическое» схемное решение такого регулятора представлено на Рисунке 4 . Оно использовано в качестве дросселя (регулятора) в профессиональной модели железной дороги.
Функции членства для ввода-1. Функции членства для ввода-2. Рис. 6. Функции членства для вывода. Для оценки производительности различных контроллеров был проанализирован максимальный перерегулирование, время установления и время нарастания шага. В таблице 4 показано сравнение параметров, вычисленных по ответу от блока.
Таблица 4. Сравнение различных параметров в контроллерах. Контроллер обратной связи дает 1% пикового превышения с временем установления 2 сек. Пик перерегулирования находится на более высокой стороне. Чтобы компенсировать превышение максимального пика, был разработан модельный контроллер. Внутренний контроллер модели уменьшает пик превышения до 0% и уменьшает время установления до 9 секунд. Для дальнейшего улучшения ответа был разработан контроллер нечеткой логики с семью функциями членства. Разработанный контроллер нечеткой логики дает пик превышения 0% и уменьшает время установления до 3 секунд.
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (Рисунок 5).
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа . Особенности этого транзистора типа MOSFET - большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
В данной работе изучены сравнительные исследования производительности различных обычных контроллеров и контроллера нечеткой логики. Х. Эксперимент в лингвистическом синтезе с нечетким логическим контроллером. . И обратно пропорциональна потоку на полюс. Уже объяснено выше, что скорость двигателя постоянного тока обратно пропорциональна потоку на полюс. Таким образом, уменьшая поток, скорость может быть увеличена и наоборот.
Для управления потоком реостат добавляется последовательно с обмоткой возбуждения, как показано на принципиальной схеме. Добавление большего сопротивления последовательно с обмоткой поля увеличивает скорость при уменьшении потока. Хотя скорость может быть увеличена выше номинального значения за счет уменьшения потока с помощью этого метода, она ограничивает максимальную скорость, так как ослабление потока за пределом будет отрицательно влиять на коммутацию. Расположение этой системы показано на рисунке справа.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (Рисунок 4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Переменное сопротивление последовательно с арматурой
Следовательно, этим способом можно получить очень плавное управление скоростью двигателя постоянного тока. 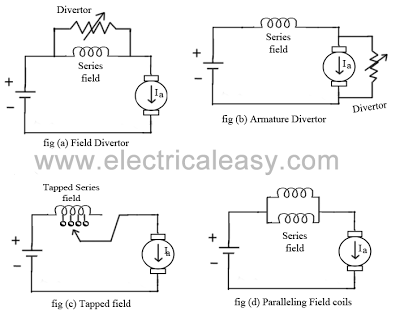
Дивертор поля: истинное сопротивление подключается параллельно полю серии, как показано на рис. Этот переменный резистор называется дивертором, так как желаемое количество тока может быть перенаправлено через этот резистор, и, следовательно, ток через катушку поля может быть уменьшен. Следовательно, поток может быть уменьшен до желаемого количества, и скорость может быть увеличена. При заданном крутящем моменте постоянной нагрузки, если ток якоря снижается, поток должен увеличиваться. Управляемое полевое управление: Как показано на рисунке, катушка катушки измеряет количество оборотов. Таким образом, мы можем выбрать различное значение Ø, выбрав различное количество оборотов. Параллельные катушки поля: в этом методе несколько скоростей могут быть получены перегруппировкой катушек, как показано на рис. Дивертор арматуры: Дивертор подключен через арматуру, как на рис.
. Вы знакомы со всеми приложениями схем таймера 555?
Еще одна проблема таких регуляторов - это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на Рисунке 4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Мы все знаем, что для лучшего понимания лучшим источником является аутентифицированная книга по этому вопросу. Мы подробно рассмотрели их. Вы проверяете их и покупаете здесь: -. В дополнение к управлению скоростью двигателей его направление вращения также может быть изменено с использованием этой схемы.
При увеличении рабочего цикла среднее напряжение на двигателе будет высоким, что приведет к более высокой скорости двигателя и наоборот. Помещенный внутри магнитного поля, будет происходить механическая сила, испытываемая этим проводником. Следовательно, для этого необходимо установить магнитное поле. Магнитное поле, очевидно, установлено магнитом. Магнит может быть любым способом, то есть он может быть электромагнитом или может быть постоянным магнитом. Вы когда-нибудь открывали какую-нибудь игрушку, если бы вы это сделали, вы, очевидно, нашли в ней двигатель с батарейным питанием.
Еще одно замечание к схеме на Рисунке 4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ± 20 В, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12 В, невозможны.
Они по существу просты в строительстве. Эти двигатели обычно используются в качестве стартера в автомобилях, стеклоочистителях, шайбах, для воздуходувок, используемых в обогревателях и кондиционерах, для подъема и опускания окон, которые также широко используются в игрушках.
Ядро сердечника изготовлено из количества лакового изолированного, щелевого кругового ламинирования стальных листов. Фиксируя эти круглые стальные листы один за другим, образуется сердечник сердечника с цилиндрической формой. Эти пазы на внешней периферии сердечника якоря используются для размещения в них якорных проводников. Арматурные проводники соединены соответствующим образом, что приводит к возникновению. Концевые выводы обмотки соединены с сегментами коммутатора, расположенными на валу двигателя.
Если использовать биполярный транзистор, то возникает проблема формирования достаточного по величине базового тока. Как известно, для насыщения ключа на биполярном транзисторе ток его базы должен быть, по крайней мере, не менее 0.06 от тока нагрузки. Понятно, что операционный усилитель такой ток может не обеспечить. С этой целью в аналогичном, по сути, регуляторе, который используется, например, в популярном мини-гравере PT-5201 компании , применен транзистор , представляющий собой схему Дарлингтона. Тут интересный момент. Эти мини-граверы иногда выходят из строя, но не из-за перегрева транзистора, как можно было бы предположить, а из-за перегрева ИМС (максимальная рабочая температура +70 °С) выходным транзистором (максимально допустимая температура +150 °С). В изделиях, которыми пользовался автор статьи, он был вплотную прижат к корпусу ИМС и посажен на клей, что недопустимо нагревало ИМС и почти блокировало теплоотвод. Если вам попалась такое исполнение, то лучше «отклеить» транзистор от ИМС и максимально отогнуть. За это know-how автор статьи был премирован компанией Pro’sKit набором инструментов. Как видите все нужно решать в комплексе - смотреть не только на схемотехнику, но и внимательно относится к конструкции регулятора в целом.
Поэтому очень эффективен в этом типе двигателя.
. Управление скоростью означает преднамеренное изменение скорости привода до значения, необходимого для выполнения конкретного рабочего процесса. Управление скоростью - это другая концепция регулирования скорости, когда происходит естественное изменение скорости, вызванное изменением нагрузки на вал. Управление скоростью выполняется вручную оператором или с помощью некоторого автоматического устройства управления. Одной из важных особенностей является то, что его скорость можно контролировать с относительной легкостью.
Есть еще несколько интересных схем более простых ШИМ-регуляторов. Например, две схемы на одиночном операционном усилителе с драйвером опубликованы в [
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.
В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
- СИФУ (Система Импульсно - Фазового Управления)
- Регулятор
- Защита
Принципиальная схема привода приведена ниже.
Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно - Фазового Управления) - преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» - DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».
Ниже представлены осциллограммы, поясняющие принцип работы. 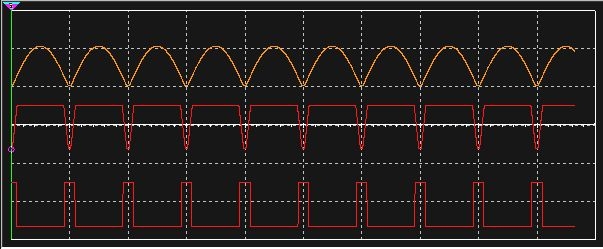
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта . Можно скачать, запустить и посмотреть как работает данный узел.
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
Вот осциллограммы. 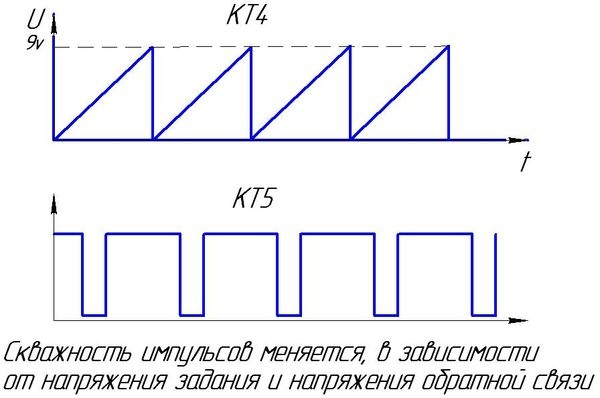
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ - S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке - «земля», R13, - С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов - в схеме предусмотрен узел «разгона - торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Теперь рассмотрим принцип работы регулятора оборотов
.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона - торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.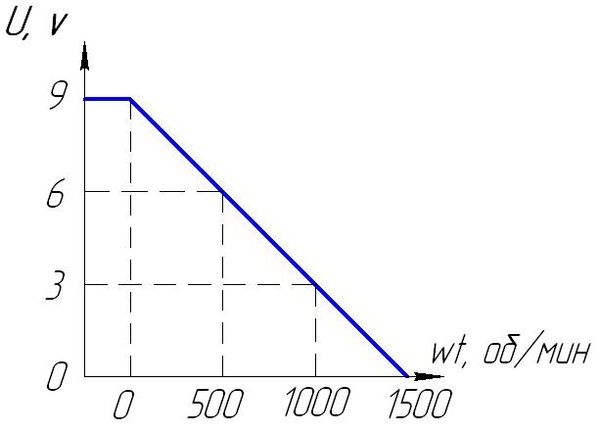
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.
СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 - компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) - происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 - 10 секунд вновь включив его.
Силовая часть блока управления.
Схема силовой части представлена ниже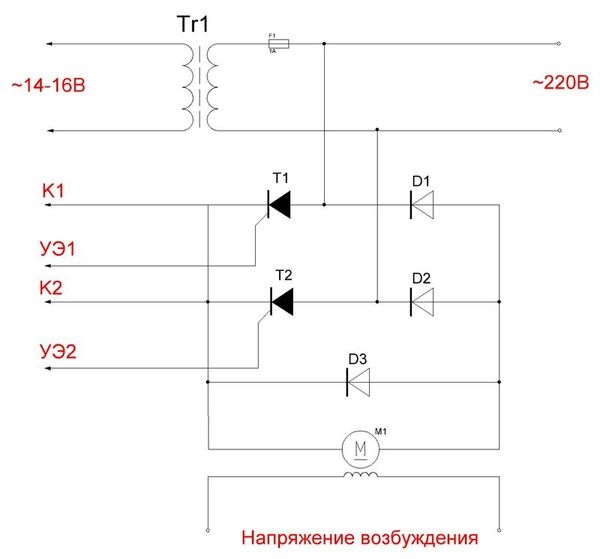
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя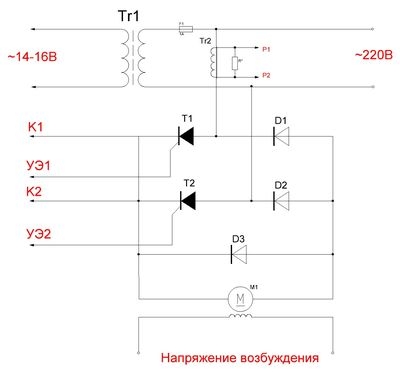
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
2. Использовать датчик якорного напряжения. Схема приведена ниже.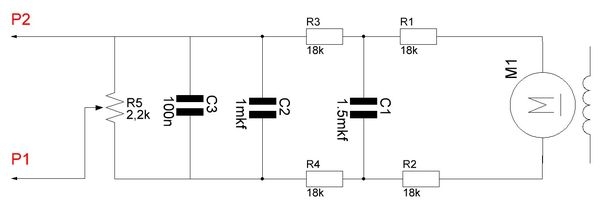
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)

Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.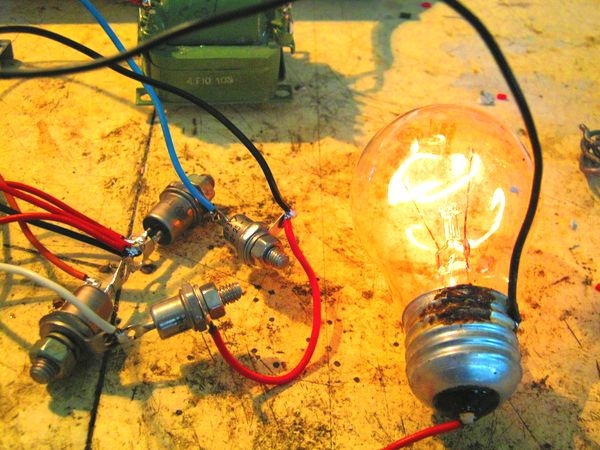
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 - 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя. 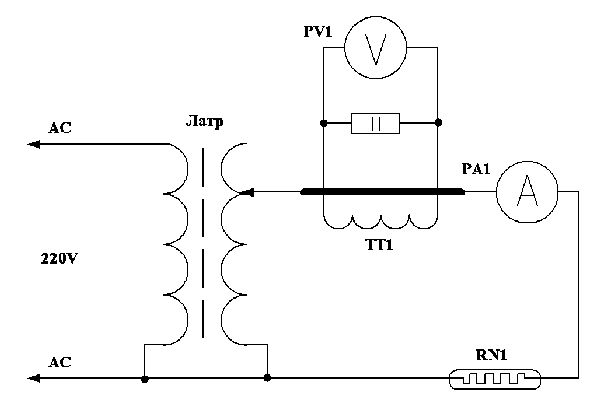
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.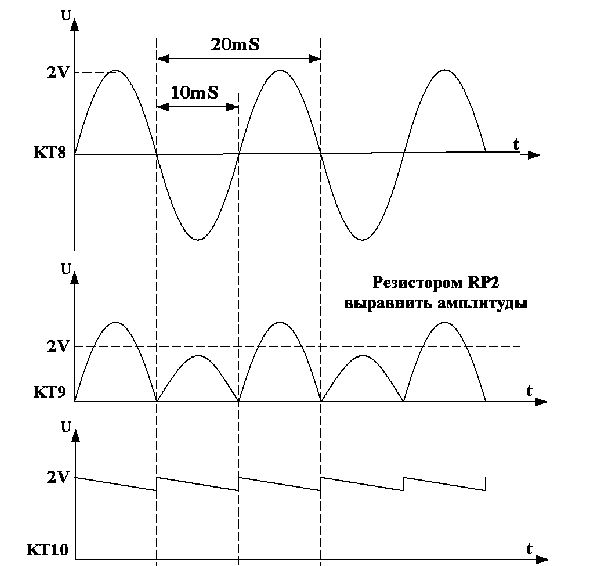
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.
Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.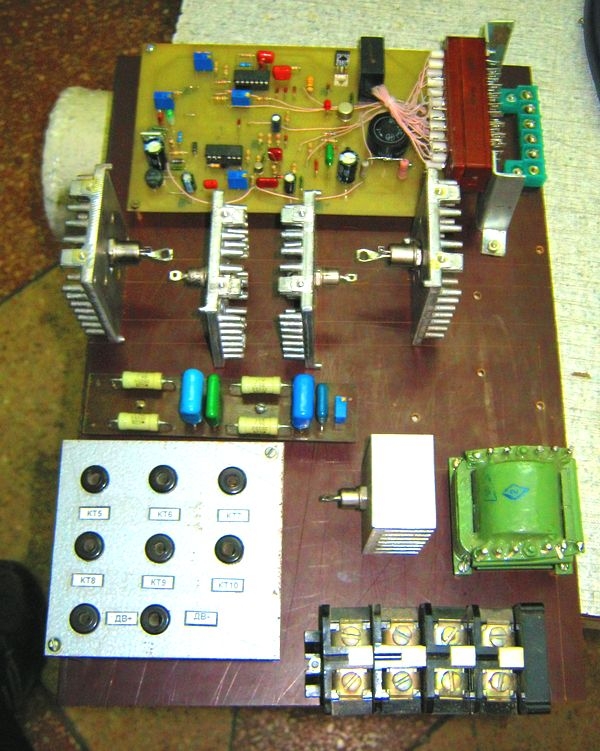
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
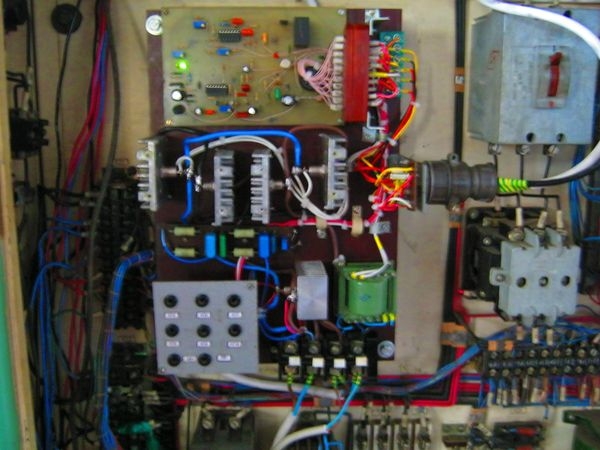
Вот смонтированный блок управления в силовом шкафу станка

На другой стороне силового шкафа был установлен маленький пульт управления.
На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй - многооборотный - для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.

 Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов
Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование
Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки
Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки Сущность предоставления социальных услуг населению по оквэд
Сущность предоставления социальных услуг населению по оквэд